Содержание
что это такое, принцип работы, виды, для чего используется
Принцип действия
Работа устройства происходит по принципу обратного взаимодействия с системными сигналами. Сервопривод в определенный момент времени получает входящие параметры регулирующего значения и поддерживает его на выходе производимого элемента.
Конструкция устройства
Механизм подобного типа обычно имеет следующие составляющие:
- Привод — электрический мотор с редуктором или похожие устройства. Необходим для уменьшения скорости движения, если она слишком большая.
- Датчик обратной связи или потенциометр, меняющий угол поворота вала.
- Блок, отвечающий за управление и питание.
- Вход или конвертер.
В принципе работы самого простого варианта лежит схема обрабатывания значений, исходящих от датчика обратной связи и настраиваемых входящих сигналов для подачи напряжения необходимой полярности на двигатель. Сложные устройства, работающие с использованием микросхем, учитывают инерцию, обеспечивая ровный период разгона или торможения, что помогает уменьшить уровень нагрузок и добиться точной синхронизации показателей.
Сложные устройства, работающие с использованием микросхем, учитывают инерцию, обеспечивая ровный период разгона или торможения, что помогает уменьшить уровень нагрузок и добиться точной синхронизации показателей.
Разновидности
Различают два вида сервоприводов:
- Синхронные – задают темп скорости вращения двигателя и другие параметры, быстрее достигая указанной скорости вращения.
- Асинхронные – способны сохранять работу двигателя даже при низких оборотах.
Также устройства разделяют на электромеханические и электрогидромеханические по особенностям конструкции и принципу работы.
Основные характеристики
Механизмы имеют ряд параметров, характеризующих их работу:
- Усиление на валу оказывает прямое влияние на крутящий момент. Это значение является одной из ключевых характеристик, в паспорте устройства может указываться несколько параметров для различных величин напряжения.

- Скорость поворота также имеет важное значение в работе механизма. Обычно указывается в параметре времени – необходимо, чтобы выходной вал изменил свое направление на 60 градусов.
- Указывается тип устройств — цифровой или аналоговый. Цифровые управляются при помощи кодовых команд, которые последовательно передаются через интерфейс. Аналоговые управляются через подачу разных частот, параметры которых задаются определенным образом.
- Питание может быть различным, но у большинства таких агрегатов оно находится в диапазоне 4,8-7,2 вольта.
- Угол поворота. Обычно это значение в 180 или 360 градусов.
- Сервопривод может быть переменного или постоянного вращения.

Имеет значение материал изготовления. Детали могут быть металлическими, пластиковыми, либо в комбинированном составе.
Управление серводвигателем
К устройству по присоединенному к нему проводу подается управляющий сигнал, представляющий собой импульсы постоянной частоты и переменной ширины. При подаче сигнала в проводимую схему генератор производит свой импульс, размер которого устанавливается с помощью потенциометра. Другая часть схемы проводит анализ всех поступаемых сигналов, и если он разный, то происходит включение сервопривода. Если размеры импульсов равнозначные, электромотор отключается.
При подаче сигнала в проводимую схему генератор производит свой импульс, размер которого устанавливается с помощью потенциометра. Другая часть схемы проводит анализ всех поступаемых сигналов, и если он разный, то происходит включение сервопривода. Если размеры импульсов равнозначные, электромотор отключается.
Серводвигатели отличаются своим разнообразием по конструкции и принципу действия. Модели бывают со щетками и без щеток. Первая категория представлена двигателями постоянного тока. Устройства, имеющие щетки, более разнообразны – к ним относятся шаговые двигатели и работающие от переменного тока. Последняя группа делится еще на два вида — синхронные и асинхронные. Синхронные двигатели, в зависимости от особенностей работы, могут быть вращающимися или линейными.
В работе моторов также используется сервоусилитель – это элемент конструкции, который обеспечивает подачу питания и управление двигателем с постоянными магнитами. Может работать при необходимости и в автономном режиме, при помощи специальной программы, которая предварительно загружается в память устройства.
Агрегаты, гарантирующие высокую точность работы, являются весьма востребованными. Подобные двигатели широко применяются в различных сферах промышленности, всевозможных станках и оборудовании, автомобилестроении.
Область применения
В данный момент сервоприводы получили достаточно широкое распространение. Их можно встретить в точных приборах, автоматах, производящих различные платы, программируемых станках, промышленных роботах и других механизмах. Большую популярность приводы такого типа приобрели в авиамодельной сфере за счет эффективного расхода энергии и равномерного движения.
Сервоприводы меняются и развиваются. В самом начале появления они обладали коллекторными моторами с обмотками на роторе. Постепенно число обмоток выросло, также увеличилась и скорость вращения и разгона. Позже обмотки начали располагаться снаружи магнита, что также способствовало повышению эффективности работы. Дальнейшие усовершенствования позволили отказаться от коллектора, стали использоваться постоянные магниты ротора. Наиболее популярны сейчас сервоприводы, которые работают от программируемого контроллера. Это дает возможность создавать приборы высокой точности и современную технику.
Наиболее популярны сейчас сервоприводы, которые работают от программируемого контроллера. Это дает возможность создавать приборы высокой точности и современную технику.
Возможность достижения высокой точности часто становится решающим фактором для применения сервопривода. Кроме того, благодаря новым цифровым разработкам, позволяющим предусмотреть различные способы связи с объектами, система использует компьютер для управления и настройки, что значительно упрощает работу.
В различных сферах также используются серводвигатели. Они могут перемещать выходной вал в заданное положение и удерживать его автоматически. Также помогут придать движение какому-либо механизму, координируемому вращениями вала. Для мотора важными параметрами являются равномерность и тональность движения, эффективность затрачиваемой энергии.
Как устроен сервопривод и принцип его работы описаны в блоге Planeta Hobby
Третий компонент аппаратуры управления – сервомашинка. В данной статье мы постараемся объяснить вам, что это за компонент, каково его назначение, устройство и принцип работы сервопривода.
В данной статье мы постараемся объяснить вам, что это за компонент, каково его назначение, устройство и принцип работы сервопривода.
Определение сервопривода
Рулевой сервопривод – устройство с электродвигателем, которое позволяет добиться точного управления форматом движения радиоуправляемой модели путем отрицательной обратной связи. Любой сервопривод в своем устройстве имеет датчик и блок управления, который поддерживает определенные значения на датчике в соответствии с внешним параметром.
Опишем более простым языком, как работает сервопривод:
- Сервопривод получает импульсный сигнал – управляющее значение, которое определяет угол поворота качалки сервы,
- Блок управления начинает сравнение поступившего параметра со значением на своем датчике,
- В зависимости от результата сравнения БУ возвращает сигнал, который предопределяет, какое действие необходимо выполнить: повернуть, ускориться или замедлиться, чтобы сравниваемые показатели стали одинаковыми.

Устройство сервопривода
Большинство современных рулевых машинок построены по одному принципу и состоят из таких составных частей: выходной вал, шестерни редуктора, двигатель постоянного тока, потенциометр, печатная плата и управляющая электроника.
Редуктор вместе с мотором образуют привод. Чтобы трансформировать поступающее напряжение в механический поворот, нужен электродвигатель. Редуктор же – конструкция из шестеренок – преобразует крутящий момент и служит для понижения скорости вращения двигателя, так как часто она настолько большая, что совсем не годится для практического применения.
Вместе с включением и выключением электродвигателя вращается и выходной вал, к которому закрепляется качалка – ее, в свою очередь, крепят к рулю модели. Именно качалка будет задавать движение нашей модели, а для этого в устройстве сервопривода предусмотрен потенциометр – датчик, способный превратить угол поворота обратно в электросигнал.
Однако, одним из главных элементов является плата управления, которая представляет собой электронную схему. Именно она получает электрический импульс, анализирует полученный сигнал с данными потенциометра и включает/выключает электродвигатель. Вот как устроен сервопривод и работа его элементов.
Кстати, в качестве мотора в устройстве сервопривода могут использоваться коллекторные, коллекторные Coreless и бесколлекторные двигатели.
Управление сервоприводом. Принцип работы
Сервопривод получает импульсные сигналы, которые проходят по специальному проводу от приемника. Частота таких сигналов составляет 20мс, а их продолжительность может варьироваться в пределах 0,8-2,2мс. Чтобы у вас появилось четкое представление, как все-таки сигнал трансформируется в перемещение качалки, нужно проанализировать стандартную схему сервы.
ГОП – генератор опонного импульса (к нему подсоединен потенциометр), К – компататор, УВХ – устройство выборки-хранения, М – электрический мотор, который охватывается диагональю силового моста.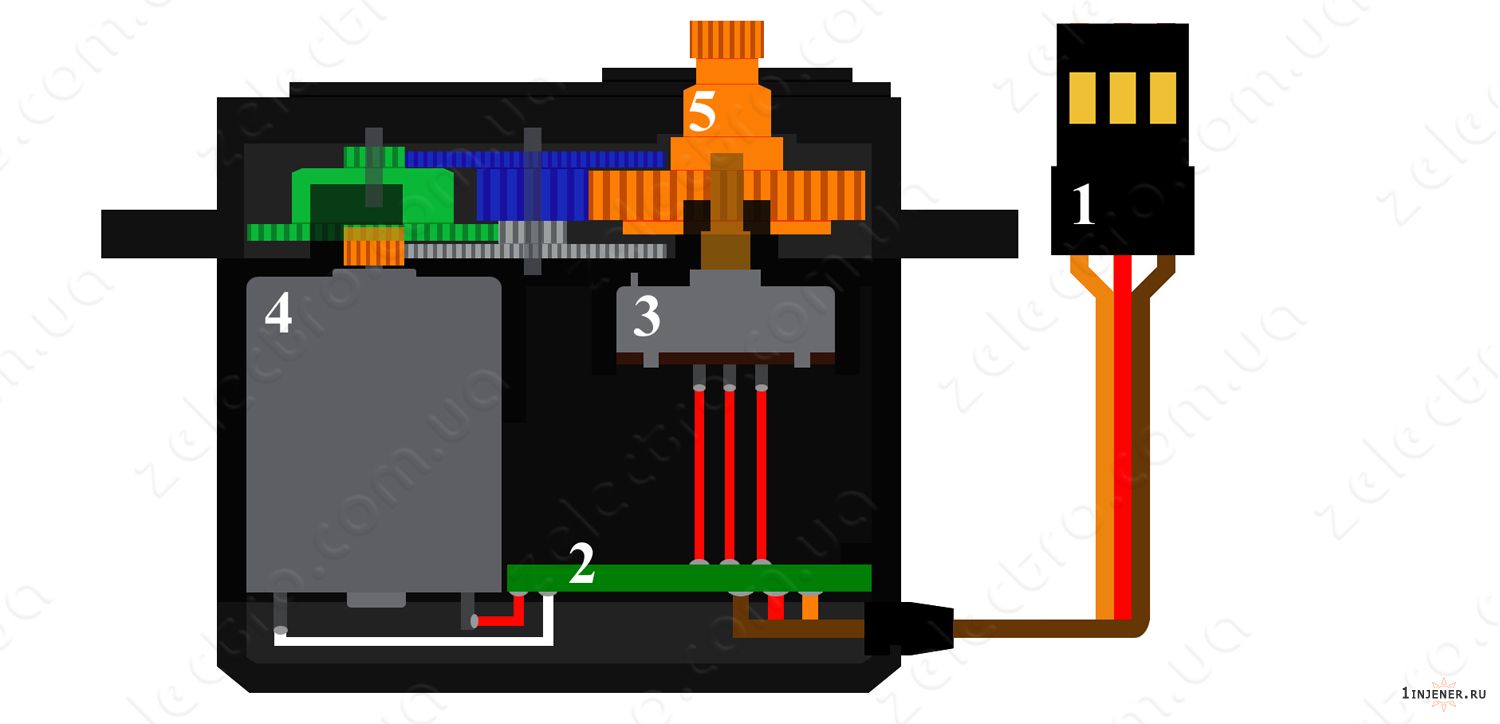
Теперь разберём более подробно, как работает сервопривод. Итак, импульсный сигнал поступает от ресивера на компататор и в то же время активирует ГОП. Продолжительность опорного импульса связана с положением потенциометра, который соединен с выходным валом физически. Когда качалка находится в средней позиции, длина сигнала составляет 1,5мс, если же положение крайнее – 0,8 или 2,2 мс. Управляющий сигнал и опорный импульс анализируются компататором, который рассчитывает их разностную величину (расчет ведется по длительности импульсов). Именно длина разностного импульса и определяет насколько «ожидаемое» и «фактическое» состояние руля совпадает. Полученный показатель сохраняется в качестве потенциала в УВХ. Сложно?
Принцип работы сервопривода в разных условиях
Позиция качалки сервы соответствует состоянию стика пульта управления. Продолжительность опорного и управляющего импульсов одинакова. На всех выходах компататоров выставлено значение «0». Двигатель обесточен и качалка удерживает первоначальную позицию.
Двигатель обесточен и качалка удерживает первоначальную позицию.
Пилот меняет положения стика, тем самым увеличивая управляющий импульс. На одном выходе компататора выведется разностный импульс, который будет сохранен в памяти УВХ. В этот момент на двигатель будет подано напряжение, станет вращаться, а вместе с ним и редуктор начнет движение, поворачивая качалку и потенциометр таким образом, чтобы продолжительность опорного импульса увеличивалась. Такие условия продлятся до тех пор, пока длины обоих импульсов не достигну одинаковых значений. Затем двигатель прекратит свое вращение.
Пилот отводит стик пульта в противоположную сторону, уменьшая при этом длину управляющего импульса. Управление сервоприводом на этом этапе схоже с процессом, описанном выше. На нижнем выходе компататора образуется разностный импульс, который запоминается УВХ и подает напряжение на двигатель. Мотор начинает вращаться, но уже в другую сторону, и продолжает работу до того момента, как длины импульсов снова не примут одинаковые значения.
Пилот не взаимодействует с пультом управления. Руль модели начинает поворачивать качалку сервопривода, так как учитывает нагрузку во время хода. Теперь меняется продолжительность опорного импульса, за счет чего разностный импульс посредством компататора и УВХ воздействует на двигатель и осуществляется подача момента на редуктор, что препятствует повороту качалки. Т. е. качалка удерживается в одном положении.
Мы разобрали работу сервопривода в упрощенном варианте. На самом деле существует множество нюансов по настройке и использования девайса, зная которые можно избежать поломок и неприятных ситуаций.
Теперь, понимая, как устроен сервопривод, принцип его работы, можно отправляться и выбирать девайс для своей модели. Для этого вам нужно перейти в правильный раздел сайта «Planeta Hobby». Если же вы не знаете, как правильно подобрать серву для своего самолета или авто, обращайтесь за советом нашего консультанта или читайте эту полезную статью.
Принципы работы и виды сервоприводов
Отличительной особенностью сервопривода является возможность управления через отрицательную обратную связь с использованием заданных параметров. Все оборудование данного типа можно разделить на две группы – сервоприводы постоянного тока и трехфазные сервоприводы переменного тока.
Устройство сервоприводов постоянного тока
Как правило, сервоприводы постоянного тока используются в маломощных устройствах позиционирования. Классическая область их применения – робототехника.
Конструкция современных сервоприводов довольно проста, но при этом весьма эффективна, так как позволяет обеспечить максимально точное управление движением. Сервопривод состоит из:
- двигателя постоянного тока
- шестерни редуктора
- выходного вала
- потенциометра
- платы управления, на которую подается управляющий сигнал
Двигатель и редуктор образуют привод. Редуктор используется для снижения скорости вращения двигателя, которую необходимо адаптировать для практического применения. К выходному валу редуктора крепится необходимая нагрузка. Это может быть качалка, вращающийся вал, тянущие или толкающие механизмы.
Редуктор используется для снижения скорости вращения двигателя, которую необходимо адаптировать для практического применения. К выходному валу редуктора крепится необходимая нагрузка. Это может быть качалка, вращающийся вал, тянущие или толкающие механизмы.
Для того, чтобы угол поворота превратить в электрический сигнал, необходим датчик. Его функции в сервоприводе постоянного тока с успехом выполняет потенциометр. Он выдает аналоговый сигнал (как правило, от 0 до 10 В) с дискретностью, ограниченной АЦП (аналогово-цифровым преобразователем), на который поступает этот сигнал.
Самой важной деталью сервопривода, пожалуй, является электронная плата сервоусилителя, которая принимает и анализирует управляющие импульсы, соотносит их с данными потенциометра, отвечает за запуск и выключение двигателя.
Принцип работы
Принцип действия устройств основан на использовании импульсного сигнала, который имеет три важные характеристики – частоту повторения, минимальную и максимальную продолжительность. Именно продолжительность импульса определяет угол поворота двигателя.
Именно продолжительность импульса определяет угол поворота двигателя.
Импульсные сигналы, получаемые сервоприводом, имеют стандартную частоту, а вот их продолжительность в зависимости от модели может составлять от 0,8 до 2,2 мс. Параллельно с поступлением управляющего импульса активируется работа генератора опорного импульса, который связан с потенциометром. Тот, в свою очередь, механически сопряжен с выходным валом и отвечает за корректирование его положения.
Электронная схема анализирует импульсы с учетом длительности и на основе разностной величины определяет разницу между ожидаемым (заданным) положением вала и реальным (измеренным при помощи потенциометра). Затем производится корректировка путем подачи напряжения на питание двигателя.
Основные положения устройства
Если продолжительность опорного и управляющего импульсов совпадает, наступает так называемый нулевой момент. В это время двигатель сервопривода не работает, вал привода находится в исходном (неподвижном) положении.
При увеличении длительности управляющего импульса плата фиксирует разбежку показателей, двигатель получает напряжение и приходит в движение. В свою очередь, редуктор начинает воздействовать на выходной вал, который поворачивается таким образом, чтобы достигнуть увеличения продолжительности опорного импульса. Как только он сравняется с управляющим импульсом, двигатель прекратит свою работу.
При уменьшении длительности управляющего импульса происходит все то же самое, только с точностью до наоборот, так как двигатель начинает вращаться в обратную сторону. Как только импульсы сравнялись, двигатель останавливается.
Сервопривод переменного тока
В сервоприводах переменного тока используется синхронный двигатель с мощными постоянными магнитами. В таких двигателях частота вращения ротора совпадает с частотой вращения магнитного поля, наводимого в обмотке статора.
Принцип работы сервопривода на основе трехфазного синхронного электродвигателя состоит в следующем. На обмотки статора поступает трехфазное напряжение, которое создает внутри него вращающееся магнитное поле. Это поле взаимодействует с постоянными магнитами, расположенными в роторе. В результате ротор вращается с частотой магнитного поля.
На обмотки статора поступает трехфазное напряжение, которое создает внутри него вращающееся магнитное поле. Это поле взаимодействует с постоянными магнитами, расположенными в роторе. В результате ротор вращается с частотой магнитного поля.
На валу ротора закреплен энкодер с высокой разрешающей способностью. Сигнал от него поступает по отдельному кабелю на специальный вход сервоусилителя. В то же время на управляющий вход сервоусилителя подается сигнал управления. В результате сравнения этих двух сигналов выделяется сигнал рассогласования, величина которого прямо пропорциональна разнице между целевыми и актуальными показателями вращения двигателя. На основании данного сигнала формируется трехфазное напряжение с такими параметрами, которые обеспечивают максимально быстрое уменьшение рассогласования до нуля.
Режимы управления
Существуют три основных режима работы сервопривода переменного тока.
Режим управления положением. Главное в этом режиме – контроль за углом поворота вала ротора. Управление производится последовательностью импульсов, которые могут приходить, например, с контроллера. Этот режим используется для точного позиционирования различных узлов технологического оборудования.
Главное в этом режиме – контроль за углом поворота вала ротора. Управление производится последовательностью импульсов, которые могут приходить, например, с контроллера. Этот режим используется для точного позиционирования различных узлов технологического оборудования.
Комбинация импульсов для управления положением может передавать информацию не только по положению, но также по скорости и направлению вращения двигателя. Для этого могут использоваться три типа сигналов: 1) квадратурные импульсы (со сдвигом фаз на 90 градусов), 2) импульсы вращения по или против часовой стрелки, действующие поочередно и 3) импульсы скорости и потенциал направления, подающиеся на два входа.
Как правило, во всех сервоусилителях входы управления именуются как PULSE, SIGN.
Режим управления скоростью. В данном случае управление производится аналоговым сигналом. Значения скорости также могут переключаться на фиксированные величины подачей сигналов на соответствующие дискретные входы. В случае использования разнополярного аналогового управляющего сигнала возможна смена направления вращения серводвигателя.
В случае использования разнополярного аналогового управляющего сигнала возможна смена направления вращения серводвигателя.
Режим управления скоростью схож с работой асинхронного двигателя, управляемого преобразователем частоты. Задаются такие параметры, как время разгона и замедления, максимальная и минимальная скорости и другие.
Режим управления моментом.
В этом режиме двигатель может вращаться либо стоять на месте, но при этом момент на валу будет заданным. Управление может производиться дискретным либо аналоговым двухполярным сигналом. Этот режим может использоваться для машин, где необходимо менять усилие прижима, давление и т. п.
Оценка текущего момента двигателя, необходимого для управления, производится за счет встроенного датчика тока.
Процесс рекуперации
Рекуперация происходит при изменении направления (знака) момента нагрузки по отношению к вращающему моменту серводвигателя.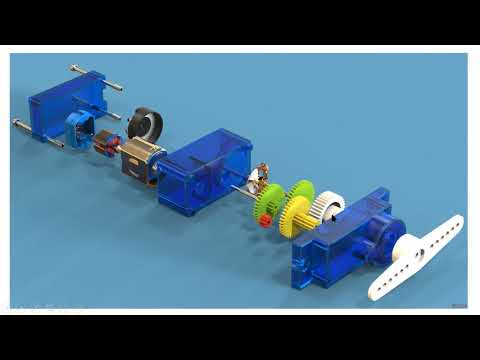 Если энергия рекуперации невелика, она накапливается на конденсаторах звена постоянного тока, повышая напряжение на них.
Если энергия рекуперации невелика, она накапливается на конденсаторах звена постоянного тока, повышая напряжение на них.
Если разница абсолютных значений моментов нагрузки и серводвигателя составляет значительную величину, напряжение на конденсаторах шины постоянного тока может превысить пороговый уровень. В этом случае энергия рекуперации сбрасывается в тормозной резистор.
Другие полезные материалы:
Выбор оптимального типоразмера электродвигателя
Сервопривод или шаговый двигатель?
Принципы программирования ПЛК
что это такое, устройство, принцип работы, виды
Вряд ли сегодня кого-то можно удивить тем количеством электрических приборов, которые окружают человека в повседневной жизни. Многие из которых давно взяли на себя часть человеческого труда и обязанностей. Повсеместная автоматизация процессов охватила самые разнообразные отрасли, начиная автомобилестроением, и заканчивая устройствами в быту. Львиную долю нагрузки относительно автоматического управления параметрами работы умных машин берет на себя сервопривод.
Что такое сервопривод?
Под сервоприводом следует понимать такое устройство, которое обеспечивает возможность управления рабочим органом посредством обратной связи. Само название произошло от латинского servus, что в переводе означает помощник. Изначально сервопривод использовался в качестве вспомогательного оборудования для различных станков, машин и механизмов. Однако с развитием технологий и постоянно растущей необходимостью повышать точность электронных устройств им начали отводить куда более значимую роль.
Устройство и принцип работы
Рис. 1. Устройство сервопривода
Устройство и принцип работы каждого сервопривода может кардинально отличаться от других моделей. Однако в качестве примера мы рассмотрим наиболее актуальные варианты.
Конструктивно он может состоять из:
- Привода – устройства, приводящего в движение рабочий орган. Может выполняться посредством синхронного или асинхронного двигателя, пневмоцилиндра и т. д.
- Передаточный механизм – система шестеренчатой кривошипной или другой передачи, редуктор.
- Рабочий элемент – управляет перемещением в пространстве, непосредственно вал редуктора, передаточный механизм и т.д.
- Датчик – сигнализирует о достигнутом положении и передает информацию по каналу обратной связи.
- Блок питания – может применяться в случае прямого подключения сервопривода к сети, где требуется преобразование уровня и типа напряжения.
- Блок управления – осуществляет подачу управляющих сигналов на сервомотор для передвижения или корректировки места положения. Для этого применяются микропроцессоры, микроконтроллеры и т.д. К примеру, очень популярна плата Arduino.
 д.
д.Принцип действия заключается в подаче управляющего импульса на асинхронный или синхронный двигатель, который начинает вращаться, пока рабочий орган не окажется в нужной позиции. Как только будет достигнуто установленное положение, на датчике обратной связи появится нужный сигнал, который, перейдя на блок управления, прекратит питание электромеханического устройства.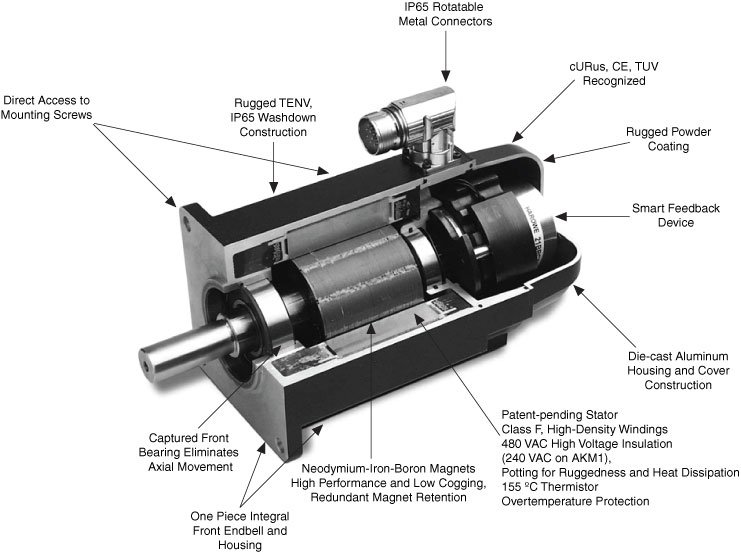 Движение сервопривода прекратится до появления новых электрических сигналов.
Движение сервопривода прекратится до появления новых электрических сигналов.
Далее начнется новый цикл работы устройства, число команд и последовательность их выполнения определяется заложенной программой.
Сравнение с шаговым двигателем
Рис. 2. Сравнение с сервопривода с шаговым двигателем
Вполне вероятно вы могли слышать, что та же функция часто выполняется шаговыми двигателями, однако между этими двумя устройствами имеется существенное отличие. Шаговый привод действительно осуществляет точное позиционирование объекта за счет четкого числа подаваемых на электрическую машину импульсов, они достаточно тихоходны и не создают лишнего шума. В остальном сервоприводы обладают рядом весомых преимуществ по сравнению с шаговыми электродвигателями:
- Могут использовать для привода любой тип электрической машины – синхронный, асинхронный, электродвигатель постоянного тока и т.д.
- Точность механического привода не зависит от износа деталей, появления люфтов, термических и механических изменений конструктивных элементов.
- Диагностирование неисправностей происходит моментально за счет обратной связи.
- Скорость вращения – любой обычный электродвигатель вращается быстрее шагового привода.
- Экономичность – вращение вала у шаговой электрической машины осуществляется при максимально допустимом напряжении питания, чтобы обеспечить максимальный момент.

Но кроме перечисленных преимуществ есть ряд позиций, по которым сервопривод уступает шаговому двигателю:
- Сложность системы управления и необходимость реализации ее работы – шаговый двигатель контролируется обычным счетчиком числа импульсов.
- Необходимость контролировать как частоту вращения, так и принимать меры для принудительного затормаживания в нужной точке – это приводит к дополнительным затратам энергии, программных и механических ресурсов.
- Обязательно используется дополнительный измерительный блок, контролирующий положение рабочего органа.
- Сервопривод обладает значительно большей стоимостью, поэтому применение шагового двигателя обходится дешевле.

Назначение
Рис. 3. Область применения
Сервопривод используется в самых различных направлениях науки и техники, где электрический привод, помимо функции вращения каких-либо элементов, должен выполнить и точное позиционирование. На практике они повсеместно используются в ЧПУ станках, автоматических задвижках, электронных клапанах, заводских станках с программным управлением, робототехнике.
В бытовых системах сервомоторы устанавливаются в системах отопления для регулировки подачи теплоносителя, топлива, управления нагревательным элементом, контроля переключения между центральными и автономными системами энергетических ресурсов и т.д. В автомобилях их используют для отпирания, запирания багажника, электронных блокировок.
Разновидности
За счет многолетнего развития сервоприводов сегодня можно встретить самые различные виды устройства. Поэтому мы рассмотрим наиболее распространенные критерии разделения.
По типу привода:
- асинхронные сервоприводы – получаются дешевле,
чем с синхронным электродвигателем,
могут обеспечить точность даже при низких оборотах выходного вала; - синхронные – более дорогой вариант, но быстрее
разгоняется, что повышает скорость выполнения операций; - линейные – не используют классических
электрических моторов, но способны развивать большое ускорение.
По принципу действия выделяют:
- электромеханический сервопривод – движение
обеспечивается электрической машиной и шестеренчатым редуктором; - гидромеханический серводвигатель –
движение осуществляется при помощи поршневого цилиндра, обладают значительно
большей скоростью перемещения;
По материалу передаточного механизма:
- полимерные – износоустойчивые и
легкие, но плохо переносят большие механические нагрузки; - металлические – наиболее тяжелый
вариант, относительно быстро изнашиваются, но могут выдерживать любые нагрузки; - карбоновые – имеют средние
характеристики по прочности и износоустойчивости, в сравнении с двумя
предыдущими, но имеют более высокую стоимость.
Рис. 4. По материалу шестерней
По типу вала двигателя:
- с монолитным ротором – тяжелые сервоприводы, создают вибрацию при вращении;
- с полым ротором – самые легкие модели, быстро реагируют на команды и набирают обороты, их легче контролировать;
- с бесколлекторным ротором – не имеют подвижных контактов, которые создают дополнительное сопротивление вращению, наиболее дорогой вариант.

Рис. 5. По типу вала
Технические характеристики
При выборе конкретной модели сервопривода необходимо руководствоваться основными техническими параметрами, которые изготовитель указывает в паспорте устройства.
Наиболее значимыми характеристиками сервомотора являются:
- Усилие на валу серводвигателя – определяет механический момент и способность перемещать определенный вес, создавать усилие при резке, фрезеровке и т.д.
Рис. 6. Усилие на валу
- Скорость вращения – показывает, сколько поворотов вала может совершить устройство за единицу времени.
- Величина питающего напряжения – чаще всего электроснабжение сервопривода выполняется постоянным током, хотя встречаются модели и с переменным током выходного напряжения. Подключение питания к сервоприводу осуществляется тремя проводами: питающим, управляющим и общим.
- Угол вращения сервопривода – поворот выходного элемента, как правило, выпускается на 180° и 360°.
- Скорость поворота – подразделяется на сервоприводы с постоянным вращением и с переменной частотой.

Способы управления
Рис. 7. Способ управления сервоприводом
По способу управления могут быть аналоговые или цифровые сервоприводы, первый из них подает сигналы с разной частотой, которая задается специальной микросхемой, контролирующей работу устройства. Цифровые сервоприводы, в свою очередь, отличаются наличием процессора, который принимает команды и реализует их в качестве различных режимов работы на приводе.
Их практическое отличие заключается в наличии мертвых зон у аналоговых способов, цифровые лишены этого недостатка, к тому же они быстрее реагируют на изменения и обладают большей точностью. Однако цифровой способ управления имеет большую себестоимость и на свою работу он расходует больше электроэнергии.
На рисунке 8 приведен пример управления сервоприводом с помощью подаваемых импульсов:
Рис. 8. Схема управления сервоприводом
Как видите на рисунке, сигнал поступает к генератору опорных импульсов (ГОП), подключенному к потенциометру. Далее сигнал поступает на компаратор (К), сравнивающий величины на выходе схемы и поступающие от датчика на рабочем органе. После этого прибор управления мостом (УМ) открывает нужную пару транзисторов моста для вращения вала мотора (М) по часовой или против часовой стрелки, также может задавать усилие за счет полного или частичного открытия перехода.
Далее сигнал поступает на компаратор (К), сравнивающий величины на выходе схемы и поступающие от датчика на рабочем органе. После этого прибор управления мостом (УМ) открывает нужную пару транзисторов моста для вращения вала мотора (М) по часовой или против часовой стрелки, также может задавать усилие за счет полного или частичного открытия перехода.
Преимущества и недостатки
К преимуществам сервопривода следует отнести:
- Универсальность
устройства – может с легкостью устанавливаться в самые различные приборы, так
как технические особенности редко влияют на конечный результат. - Может
реализовать широкий спектр крутящего момента за счет использования редуктора и
изменения передаточного числа. - Обладает
большим ускорением, что значительно повышает продуктивность и сокращает сроки
выполнения работы. - Точное
выставление позиции благодаря проверке места положения на датчике. - Не боится
перегрузок, что увеличивает срок службы, позволяет работать и в аварийных
ситуациях.
К недостаткам следует отнести:
- Относительно большую стоимость – наличие обратной связи, датчиков и прочего вспомогательного оборудования обуславливает повышение себестоимости сервопривода.
- Износ передаточного механизма – в значительной мере ухудшает точность и эффективность, требует замены.
- Более сложная настройка работы – требует изменения параметров программного обеспечения или полной замены сервопривода.
подключение, управление, примеры работы [Амперка / Вики]
Познакомимся поближе с сервоприводами. Рассмотрим их разновидности, предназначение, подсказки по подключению и управлению.
Что такое сервопривод?
Сервопривод — это мотор с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервомотором является любой тип механического привода, имеющий в составе датчик положения и плату управления.
Простыми словами, сервопривод — это механизм с электромотором, который может поворачиваться в заданный угол и удерживать текущее положение.
Элементы сервопривода
Рассмотрим составные части сервопривода.
Электромотор с редуктором
За преобразование электричества в механический поворот в сервоприводе отвечает электромотор. В асинхронных сервоприводах установлен коллекторный мотор, а в синхронных — бесколлекторный.
Однако зачастую скорость вращения мотора слишком большая для практического использования, а крутящий момент — наоборот слишком слабый. Для решения двух проблем используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, вращается выходной вал — конечная шестерня редуктора, к которой можно прикрепить нечто, чем мы хотим управлять.
Позиционер
Для контроля положения вала, на сервоприводе установлен датчик обратной связи, например потенциометр или энкодер. Позиционер преобразует угол поворота вала обратно в электрический сигнал.
Плата управления
За всю обработку данных в сервоприводе отвечает плата управления, которая сравнивает внешнее значения с микроконтроллера со показателем датчика обратной связи, и по результату соответственно включает или выключает мотор.
Выходной вал
Вал — это часть редуктора, которая выведена за пределы корпуса мотора и непосредственно приводиться в движение при подаче управляющих сигналов на сервопривод. В комплектации сервомоторов идут качельки разных формфакторов, которые одеваются на вал сервопривода для дальнейшей коммуникации с вашими задумками.
Не рекомендуем прилагать к валу нагрузки, которые больше крутящего момента сервопривода. Это может привести к разрушению редуктора.
Выходной шлейф
Для работы сервопривода его необходимо подключить к источнику питания и к управляющей плате. Для коммуникации от сервопривода выходит шлейф из трёх проводов:
Красный — питание сервомотора. Подключите к плюсовому контакту источнику питания. Значения напряжение смотрите в характеристиках конкретно вашего сервопривода.
Чёрный — земля. Подключите к минусовому контакту источника питания и земле микроконтроллера.
Жёлтый — управляющий сигнал.
Подключите к цифровому пину микроконтроллера.
 Подключите к цифровому пину микроконтроллера.
Подключите к цифровому пину микроконтроллера.Если сервопривод питается напряжением от 5 вольт и потребляет ток менее 500 мА, то есть возможность обойтись без внешнего источника питания и подключить провод питания сервомотора непосредственно к питанию микроконтроллера.
Управление сервоприводом
Алгоритм работы
Сервопривод получает на вход управляющие импульсы, которые содержат:
Для простых сервоприводов: значение угла поворота.
Для сервоприводов постоянного вращения: значения скорости и направления вращения.
Плата управления сравнивает это значение с показанием на датчике обратной связи.
На основе результата сравнения привод производит некоторое действие: например, поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра.
Интерфейс управления
Чтобы указать сервоприводу желаемое состояние, по сигнальному проводу необходимо посылать управляющий сигнал — импульсы постоянной частоты и переменной ширины.
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал от микроконтроллера поступает в управляющую схему сервопривода, имеющийся в нём генератор импульсов производит свой импульс, длительность которого определяется через датчик обратной связи. Далее схема сравнивает длительность двух импульсов:
Если длительность разная, включается электромотор с направлением вращения определяется тем, какой из импульсов короче.
Если длины импульсов равны, электромотор останавливается.
Для управления хобби-сервоприводами подают импульсы с частотой 50 Гц, т.е. период равен 20 мс:
1540 мкс означает, что сервопривод должен занять среднее положение.
544 мкс — для 0°
2400 мкс — для 180°.
Обратите внимание, что на вашем конкретном устройстве заводские настройки могут оказаться отличными от стандартных. Некоторые сервоприводы используют ширину импульса 760 мкс. Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Это всего лишь общепринятые длины. Даже в рамках одной и той же модели сервопривода может существовать погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него.
Часто способ управления сервоприводами называют PWM (Pulse Width Modulation) или PPM (Pulse Position Modulation). Это не так, и использование этих способов может даже повредить привод. Корректный термин — PDM (Pulse Duration Modulation) в котором важна длина импульсов, а не частота.
Характеристики сервопривода
Рассмотрим основные характеристики сервоприводов.
Крутящий момент
Момент силы или крутящий момент показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость поворота
Скорость сервопривода — это время, которое требуется выходному валу повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё можно вычислить скорость в оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют именно интервал времени за 60°.
Форм-фактор
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов.
| Форм-фактор | Вес | Размеры |
|---|---|---|
| Микро | 8-25 г | 22×15×25 мм |
| Стандартный | 40-80 г | 40×20×37 мм |
| Большой | 50-90 г | 49×25×40 мм |
Внутренний интерфейс
Сервоприводы бывают аналоговые и цифровые. Так в чём же их отличия, достоинства и недостатки?
Так в чём же их отличия, достоинства и недостатки?
Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Оба типа сервопривода принимают одинаковые управляющие импульсы. После этого аналоговый сервопривод принимает решение, надо ли изменять положение, и в случае необходимости посылает сигнал на мотор. Происходит это обычно с частотой 50 Гц. Таким образом получаем 20 мс — минимальное время реакции. В это время любое внешнее воздействие способно изменить положение сервопривода. Но это не единственная проблема. В состоянии покоя на электромотор не подаётся напряжение, в случае небольшого отклонения от равновесия на электромотор подаётся короткий сигнал малой мощности. Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент. Образуются «мёртвые зоны» по времени и расстоянию.
Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент. Образуются «мёртвые зоны» по времени и расстоянию.
Эти проблемы можно решать за счёт увеличения частоты приёма, обработки сигнала и управления электромотором. Цифровые сервприводы используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. Получается, что цифровой сервопривод способен быстрее реагировать на внешние воздействия, быстрее развивать необходимые скорость и крутящий момент, а значит, лучше удерживать заданную позицию, что хорошо. Конечно, при этом он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в производстве, а потому стоят заметно дороже. Собственно, эти два недостатка — все минусы, которые есть у цифровых сервоприводов. В техническом плане они безоговорочно побеждают аналоговые сервоприводы.
Материалы шестерней
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические. Все они широко используются, выбор зависит от конкретной задачи и от того, какие характеристики требуются в установке.
Все они широко используются, выбор зависит от конкретной задачи и от того, какие характеристики требуются в установке.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостатой — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. К сожалению, они обойдутся вам достаточно дорого.
Коллекторные и бесколлекторные моторы
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. Преимущества те же что и у остальных бесколлекторных моторов: нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Сервопривод постоянного вращения
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°».
Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2. Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода:
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Середнее положение | Остановка сервопривода |
Servo. write(180) write(180) | Крайне правое положение | Полный ход в обратном направлении |
Для иллюстрации работы с сервами постоянного вращения мы собрали двух мобильных ботов — на Arduino Uno и Iskra JS. Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Примеры работы с Arduino
Схема подключения
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
красный — питание; подключается к контакту
5Vили напрямую к источнику питаниякоричневый или чёрный — земля
жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
Рассмотрим на примере подключения 12V сервопривода:
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Пример использования библиотеки Servo
- servo_example.ino
// подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объект для управления сервоприводом Servo myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9); } void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(0); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500); }
По аналогии подключим 2 сервопривода
- 2servo_example.ino
// подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объекты для управления сервоприводами Servo myservo1; Servo myservo2; void setup() { // подключаем сервоприводы к 11 и 12 пину myservo1.attach(11); myservo2.attach(12); } void loop() { // устанавливаем сервопривод в серединное положение myservo1. write(90);
myservo2.write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo1.write(0);
myservo2.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo1.write(180);
myservo2.write(180);
delay(500);
}
 write(90);
myservo2.write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo1.write(0);
myservo2.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo1.write(180);
myservo2.write(180);
delay(500);
}
write(90);
myservo2.write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo1.write(0);
myservo2.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo1.write(180);
myservo2.write(180);
delay(500);
}Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками / передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
- servo2_example.ino
// подключаем библиотеку для работы с сервоприводами // данная библиотека совместима с библиотекой «VirtualWire» // для работы с приёмником и передатчиком на 433 МГц #include <Servo2.
h>
// создаём объект для управления сервоприводом
Servo2 myservo;
void setup()
{
// подключаем сервопривод к 9 пину
myservo.attach(9);
}
void loop()
{
// устанавливаем сервопривод в серединное положение
myservo.write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo.write(180);
delay(500);
}
 h>
// создаём объект для управления сервоприводом
Servo2 myservo;
void setup()
{
// подключаем сервопривод к 9 пину
myservo.attach(9);
}
void loop()
{
// устанавливаем сервопривод в серединное положение
myservo.write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo.write(180);
delay(500);
}
h>
// создаём объект для управления сервоприводом
Servo2 myservo;
void setup()
{
// подключаем сервопривод к 9 пину
myservo.attach(9);
}
void loop()
{
// устанавливаем сервопривод в серединное положение
myservo.write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo.write(180);
delay(500);
} Примеры работы с Espruino
Примеры работы с Raspberry Pi
Вывод
Сервоприводы бывают разные, одни получше — другие подешевле, одни надёжнее — другие точнее. И перед тем, как купить сервопривод, стоит иметь в виду, что он может не обладать лучшими характеристиками, главное, чтобы подходил для вашего проекта. Удачи в ваших начинаниях!
Ресурсы
Сервопривод: виды, управление, принцип работы
В конструкциях оборудования, создаваемого на базе высоких технологий, постоянно развиваются и совершенствуются различные автоматические процессы. Среди них широкое распространение получил сервопривод, устанавливаемый с целью совершения отдельными элементами и деталями постоянных динамических движений. Эти устройства обеспечивают постоянный контроль над углами поворота вала, устанавливают нужную скорость в приборах электромеханического типа.
Среди них широкое распространение получил сервопривод, устанавливаемый с целью совершения отдельными элементами и деталями постоянных динамических движений. Эти устройства обеспечивают постоянный контроль над углами поворота вала, устанавливают нужную скорость в приборах электромеханического типа.
Составной частью этих систем являются серводвигатели, которые дают возможность управлять скоростями в нужном диапазоне в установленный промежуток времени. Таким образом, все процессы и движения могут периодически повторяться, а частота этих повторов закладывается в системе управления.
Устройство сервопривода
Основные детали, из которых состоит типовой серводвигатель – ротор и статор. Для коммутации применяются специальные комплектующие в виде штекеров и клеммных коробок. Управление, контроль и коррекция процессов осуществляется с помощью отдельного управляющего узла. Для включения и выключения сервопривода используется отдельная система. Все детали, помещаются в общем корпусе.
Практически во всех сервоприводах имеется датчик, работающий и отслеживающий определенные параметры, такие как положение, усилие или скорость вращения. С помощью управляющего блока поддерживается автоматический режим необходимых параметров при работе устройства. Выбор того или иного параметра происходит в зависимости от сигналов, поступающих от датчика в установленные промежутки времени.
Разница между сервоприводом и обычным электродвигателем заключается в возможности установки вала в точно заданное положение, измеряемое в градусах. Установленное положение, так же, как и другие параметры, поддерживаются блоком управления.
Их принцип работы заключается в преобразовании электрической энергии в механическую, с помощью электродвигателя. В качестве привода используется редуктор, позволяющий снизить скорость вращения до требуемого значения. В состав данного устройства входят валы с шестернями, преобразующими и передающими крутящий момент.
Как работает сервопривод
Вращение выходного вала редуктора, связанного шестернями с сервоприводом, осуществляется путем запуска и остановки электродвигателя. Сам редуктор необходим для регулировки числа оборотов. Выходной вал может быть соединен с механизмами или устройствами, которыми необходимо управлять. Положение вала контролируется с помощью датчика обратной связи, способного преобразовывать угол поворота в электрические сигналы и на котором построен принцип работы всего устройства.
Сам редуктор необходим для регулировки числа оборотов. Выходной вал может быть соединен с механизмами или устройствами, которыми необходимо управлять. Положение вала контролируется с помощью датчика обратной связи, способного преобразовывать угол поворота в электрические сигналы и на котором построен принцип работы всего устройства.
Этот датчик известен также, под названием энкодера или потенциометра. При повороте бегунка, его сопротивление будет изменяться. Изменения сопротивления находится в прямой пропорциональной зависимости с углом поворота энкодера. Данный принцип работы позволяет устанавливать и фиксировать механизмы в определенном положении.
Дополнительно каждый серводвигатель имеет электронную плату, обрабатывающую внешние сигналы, поступающие от потенциометра. Далее выполняется сравнение параметров, по результатам которого производится запуск или остановка электродвигателя. Следовательно, с помощью электронной платы поддерживается отрицательная обратная связь.
Подключить серводвигатель можно с помощью трех проводников. По двум из них подается питание к электродвигателю, а третий служит для прохождения сигналов управления, приводящих вал в определенное положение.
Предотвратить чрезмерные динамические нагрузки на электродвигатель возможно с помощью плавного разгона или такого же плавного торможения. Для этого применяются более сложные микроконтроллеры, обеспечивающие более точный контроль и управление позицией рабочего элемента. В качестве примера можно привести жесткий диск компьютера, в котором головки устанавливаются в нужную позицию с помощью точного привода.
Управление серводвигателем
Основное условие, чтобы серводвигатель мог нормально работать, заключается в их функционировании совместно с так называемой системой G-кодов. Эти коды представляют собой набор команд управления, заложенный в специальную программу.
Если в качестве примера взять ЧПУ – числовое программное управление, то в данном случае сервоприводы будут взаимодействовать с преобразователями. В соответствии с уровнем входного напряжения они способны изменить значение напряжения на возбуждающей обмотке или якоре электродвигателя.
Непосредственное управление серводвигателем и всей системой осуществляется из одного места – блока управления. Когда отсюда поступает команда на прохождение определенного расстояния по оси координат Х, в цифровом аналоговом преобразователе возникает напряжение определенной величины, которое и поступает в качестве питания привода этой координаты. В серводвигателе начинается вращательное движение ходового винта, связанного с энкодером и исполнительным органом основного механизма.
В энкодере вырабатываются импульсы, подсчитываемые блоком, выполняющим управление сервоприводом. В программе заложено соответствие определенного количества сигналов с энкодера, установленному расстоянию, которое должен пройти исполняющий механизм. В нужное время аналоговый преобразователь, получив установленное число импульсов, прекращает выдачу выходного напряжения, в результате, серводвигатель останавливается. Точно так же под влиянием импульсов восстанавливается напряжение, и возобновляется работа всей системы.
Виды и характеристики
Серводвигатели выпускаются в самых разных вариантах, позволяющих использовать их во многих областях. Основные конструкции разделяются на коллекторные и бесколлекторные, предназначенные для работы от постоянного и переменного тока.
Кроме того, каждый сервомотор может быть синхронным и асинхронным. Синхронные устройства обладают способностью задавать высокоточную скорость вращения, а также углы поворотов и ускорение. Эти приводы очень быстро набирают номинальную скорость вращения. Сервоприводы в асинхронном исполнении управляются за счет изменения параметров питающего тока, когда его частота меняется с помощью инвертора. Они с высокой точностью выдерживают заданную скорость даже при самых низких оборотах.
В зависимости от принципиальной схемы и конструкции, сервоприводы могут быть электромеханическими и электрогидромеханическими. Первый вариант, включающий редуктор и двигатель, отличается низким быстродействием. Во втором случае действие происходит очень быстро за счет движения поршня в цилиндре.
Каждый сервопривод характеризуется определенными параметрами:
- Крутящий момент или усилие, создаваемое на валу. Считается наиболее важным показателем работы сервопривода. Для каждой величины напряжения существует собственный крутящий момент, отражаемый в паспорте изделия.
- Скорость поворота. Данный параметр представляет собой определенный период времени, который требуется, чтобы изменить позицию выходного вала на 600. Эта характеристика также зависит от конкретного значения напряжения.
- Максимальный угол поворота, на который может развернуться выходной вал. Чаще всего эта величина составляет 180 или 3600.
- Все сервоприводы разделяются на цифровые и аналоговые. В зависимости от этого и осуществляется управление сервоприводом.
- Питание серводвигателей. В большинстве моделей используется напряжение от 4,8 до 7,2В. Питание и управление осуществляется с помощью трех проводников.
- Возможность модернизации в сервопривод постоянного вращения.
- Материалы для редуктора могут использоваться самые разные. Шестерни изготавливаются из металла, карбона, пластика или комбинированных составов. Каждый из них обладает своими преимуществами и недостатками. Например, пластиковые детали плохо выдерживают ударные нагрузки, но устойчивы к износу в процессе длительной эксплуатации. Металлические шестерни, наоборот, быстро изнашиваются, зато они обладают высокой устойчивостью к динамическим нагрузкам.
Плюсы и минусы сервомоторов
Благодаря унифицированным размерам, эти устройства легко и просто устанавливаются в любые конструкции. Они безотказны и надежны, каждый из них работает практически бесшумно, что имеет большое значение при их эксплуатации на сложных и ответственных участках. Даже на невысоких скоростях можно добиться точности и плавных перемещений. Каждый сервопривод может быть настроен персоналом, в зависимости решения тех или иных задач.
В качестве недостатков отмечаются определенные сложности при настройках и сравнительно высокая стоимость.
устройство, принцип работы и схема подключения
Привет всем читателям этого блога! В данной статье будут обсуждаться трехходовые клапаны и сервоприводы.
Написана статья на уровне ликбеза, поэтому специалистов попрошу громко не смеяться над обсуждаемыми здесь вопросами.
Начнем обсуждение с трехходовых клапанов, а потом перейдем к сервоприводам. Переходим к делу.
Что такое трехходовой клапан: зачем нужен и как работает?
Трехходовой смесительный клапан
Из названия трехходового клапана понятно, что он имеет три резьбовых или фланцевых соединения.
Существуют два вида таких клапанов:
- Термосмесительные — применяются для организации подмеса холодного теплоносителя из «обратки» к горячему теплоносителю «подачи». Используется это в водяных теплых полах, тепловых узлах зданий и для защиты теплообменников котлов. Такие «трехходовики» отличаются по диаметру резьбового соединения и диапазону регулировки температуры.
- Переключатели потока — они изменяют направление течения теплоносителя, а точнее сказать они меняют контур, по которому он протекает. Так, например, переключатели потока широко используются для подключения бойлеров косвенного нагрева к отопительным котлам. В такой схеме трехходовой клапан через сервопривод подключен к термостату бойлера и при достижении пороговой температуры происходит переключение клапана и включение загрузочного насоса. После этого горячий теплоноситель начинает течь через теплообменник бойлера и нагревать воду внутри него.
Регулируемый трехходовой клапанЕсли вам интересно, то есть отдельная статья о бойлерах косвенного нагрева и схемах его подключения. Читайте и расширяйте свой кругозор.
Устройство трехходового клапана котла
Теперь давайте рассмотрим техническое устройство трехходовых клапанов.
Начнем по порядку с устройства термосмесительного клапана.
Для того, чтобы иметь наглядное представление о его внутреннем строении, посмотрите на следующий рисунок:
Устройство трехходового смесительного клапана
- Вход горячей воды.
- Термочувствительный элемент.
- Выход смешанной воды.
- Вход холодной воды.
Термочувствительный элемент расширяется или сжимается в зависимости от температуры.
Это позволяет выдерживать определенную температуру на выходе подмеса (4).
Колебания температуры обычно лежат в пределах двух или трех градусов в зависимости от разности давлений горячей и холодной воды.
Наличие в термосмесительном клапане накипи также уменьшает точность его регулировки.
Температура воды на выходе клапана может быть задана жестко при изготовлении клапана, либо может изменяться в некоторых пределах.
Делается это при помощи вращения регулировочного колеса.
Трехходовой клапан отопления: принцип работы
Теперь перейдем к рассмотрению другого вида клапанов — переключателей направления потока.
Собственно, такие клапаны могут работать и как смесительные, но управляются они при помощи ручной настройки или сервопривода.
Для большей наглядности смотрите рисунок ниже:
Трехходовой клапан для отопления: принцип работы
По сути своей такой клапан — шаровой кран, у которого отверстия в шаре не находятся на одной линии, а сделаны под прямым углом друг к другу.
Для полного переключения потока необходим поворот шара на 90°. Давайте посмотрим вид такого клапана сверху:
Трехходовой смесительный клапан: принцип работы
Угловая шкала указывает на то в каком положении находится шар внутри клапана.
Трехходовой клапан: схема подключения к котлу
Как я уже говорил, чаще всего такие клапана используют для подключения бойлера косвенного нагрева к котлу.
Схема подключения будет выглядеть следующим образом:
Трехходовой клапан: схема подключения к бойлеру
В этой схеме теплоноситель будет циркулировать либо через теплообменник бойлера, либо через радиаторы отопления.
Сервопривод клапана будет управляться термостатом бойлера.
Теперь давайте поговорим о наиболее важных технических характеристиках таких клапанов:
- Диаметр подключения — диаметр резьбы в дюймах.
- Рабочая температура — температура теплоносителя, при которой клапан отработает весь срок эксплуатации.
- Материал корпуса и уплотнений — чаще всего, такие клапаны изготавливаются из латуни, а в качестве уплотнений может быть использован эластомер (резина) типа EPDM.
- Номинальный поток — измеряется в кубических метрах за час и определяет предел пропускной способности клапана. Номинальный поток прямо пропорционален диаметру подключения клапана.
- Рабочая среда — этот параметр определяет то, в какой среде может работать данный узел. Например, это может быть только вода, либо растворы гликолей (антифризов для отопления).
Давайте двигаться дальше, следующая остановка — сервопривод!
Что такое сервопривод и как он работает?
Давайте начнем с определения. Сервопривод — это электродвигаетль, управляемый через отрицательную обратную связь.
В данном случае отрицательной обратной связью будет датчик угла поворота вала, который прекращает движение вала при достижении нужного угла.
Чтобы наглядно себе представлять сервопривод, смотрите ниже на картинку:
Сервопривод для трехходового клапана
Сервопривод: устройство и принцип работы
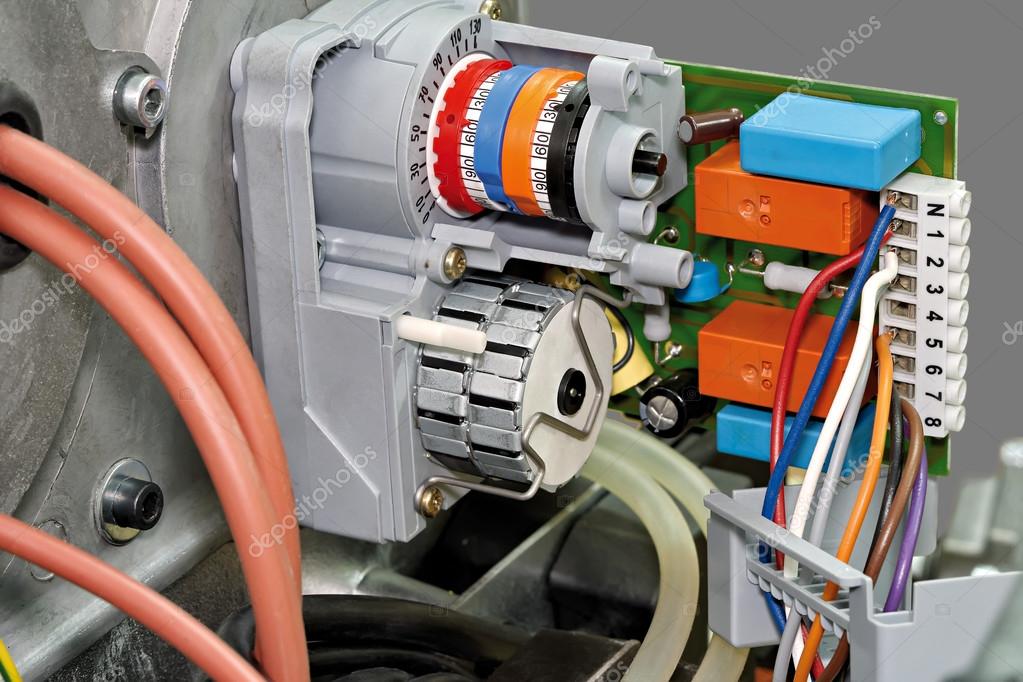
Как обычно, для наглядности рассмотрим устройство сервопривода по рисунку:
Устройство сервопривода
Как видно, внутри сервопривода расположены следующие составные части:
- Электрический мотор.
- Редуктор, состоящий из нескольких шестеренок.
- Выходной вал, которым привод вращает клапан или другое устройство.
- Потенциометр — эта та самая отрицательная обратная связь, с помощью которой осуществляется управление углом поворота вала.
- Управляющая электроника, которая расположена на печатной плате.
- Провод, по которому подводятся напряжение питания (220 или 24 В) и управляющий сигнал.
Управляющий сигнал сервопривода
Давайте теперь подробно остановимся на управляющем сигнале.
Сервопривод управляется импульсным сигналом с изменяемой шириной импульса.
Для тех, кто не знает о чем идет речь привожу еще одну картинку:
То есть ширина импульса (по времени) определяет величину угла поворота вала.
Настройка таких управляющих сигналов дело нетривиальное и зависит от конкретного привода.
Количество управляющих сигналов зависит от того, сколько положений может занимать выходной вал.
Сервопривод может быть двухпозиционным (2 управляющих сигнала), трехпозиционным (3 управляющих сигнала) и так далее.
Заключение статьи
В этой статье я рассмотрел (очень кратко) трехходовые клапана и сервоприводы.
Главное для чего они нужны — автоматизация управления инженерными сетями (водоснабжением, отоплением и так далее).
Они стоят дорого и во многих случаях без них можно обойтись, но все же есть случаи когда без них не обойтись, например при описанной выше схеме подключения бойлера.
На этом все, пишите свои вопросы в комментариях и нажимайте кнопки социальных сетей.
Как работают серводвигатели | Kollmorgen
Как работает серводвигатель? Серводвигатель — это электромеханическое устройство, которое создает крутящий момент и скорость в зависимости от подаваемого тока и напряжения. Серводвигатель работает как часть системы с замкнутым контуром, обеспечивая крутящий момент и скорость по команде от сервоконтроллера, использующего устройство обратной связи для замыкания контура. Устройство обратной связи передает такую информацию, как ток, скорость или положение, сервоконтроллеру, который регулирует работу двигателя в зависимости от заданных параметров.
Серводвигатели
доступны во множестве типов, форм и размеров. Термин сервопривод был впервые использован в 1859 году Джозефом Факортом, который реализовал механизм обратной связи, чтобы помочь управлять кораблем с помощью пара для управления рулями. Серводвигатель — это часть сервомеханизма, состоящего из трех ключевых элементов — двигателя, устройства обратной связи и управляющей электроники. Двигатель может быть переменного или постоянного тока, щеточный или бесщеточный, вращающийся или линейный, любого размера. Устройство обратной связи может быть потенциометром, устройством на эффекте Холла, тахометром, резольвером, энкодером, линейным преобразователем или любым другим датчиком, если это необходимо.Завершением сервосистемы является управляющая электроника, которая питает двигатель и сравнивает данные обратной связи и задание команд, чтобы убедиться, что серводвигатель работает в соответствии с командой. Существует много типов приложений для серводвигателей, от простых двигателей постоянного тока, используемых в любительских приложениях (например, в моделях самолетов), до сложных бесщеточных двигателей, приводимых в действие сложными контроллерами движения, используемых в многоосных обрабатывающих центрах. Одним из примеров обычного сервомеханизма является круиз-контроль транспортного средства, который состоит из двигателя (мотора), датчика скорости (обратной связи) и электроники для сравнения скорости транспортного средства с установленной скоростью.Если автомобиль замедляется, датчик передает эти данные в электронику, которая, в свою очередь, увеличивает подачу газа в двигатель, чтобы увеличить скорость до желаемой уставки — простая система с замкнутым контуром.
Простой промышленный серводвигатель состоит из двигателя постоянного тока с постоянными магнитами и встроенного тахометра, который обеспечивает выходное напряжение, пропорциональное скорости. Электроника привода подает на двигатель необходимое напряжение и ток в зависимости от напряжения, подаваемого с тахометра. В этом примере заданная скорость (представленная как командное опорное напряжение) устанавливается в драйвере, затем схема в драйвере сравнивает напряжение обратной связи тахометра и определяет, достигнута ли желаемая скорость — известная как замкнутый контур скорости.Контур скорости отслеживает заданную скорость и обратную связь тахометра, в то время как водитель регулирует мощность двигателя, чтобы поддерживать желаемую заданную скорость.
В более сложной системе серводвигателя несколько встроенных контуров настроены для оптимальной работы и обеспечения точного управления движением. Система состоит из контуров тока, скорости и положения, в которых используются прецизионные элементы обратной связи. Каждый цикл сигнализирует о следующем цикле и отслеживает соответствующие элементы обратной связи, чтобы в реальном времени вносить поправки в соответствие с заданными параметрами.
Базовый контур — это контур тока или момента. Ток пропорционален крутящему моменту во вращающемся двигателе (или силе в линейном двигателе), который обеспечивает ускорение или тягу. Датчик тока — это устройство, обеспечивающее обратную связь, связанную с током, протекающим через двигатель. Датчик отправляет сигнал обратно в управляющую электронику — обычно аналоговый или цифровой сигнал, пропорциональный току двигателя. Этот сигнал вычитается из управляемого сигнала. Когда серводвигатель находится на заданном токе, контур будет удовлетворен, пока ток не упадет ниже заданного тока.Затем цикл будет увеличивать ток до тех пор, пока не будет достигнут заданный ток, при этом цикл будет продолжаться с частотой обновления менее секунды.
Контур скорости работает таким же образом с напряжением, пропорциональным скорости. Контур скорости отправляет токовому контуру команду на увеличение тока (тем самым увеличивая напряжение), когда скорость падает ниже заданной скорости.
Позиционный контур принимает команду для ПЛК или контроллера движения, который, в свою очередь, обеспечивает команду скорости, которая подается в контур скорости, который, в свою очередь, дает команду на требуемый ток для ускорения, поддержания и замедления двигателя, чтобы он переместился в заданное положение. должность.Все три контура работают оптимизированно синхронно, чтобы обеспечить плавное и точное управление сервомеханизмом.
Работа серводвигателей
| Как работают серводвигатели
Серводвигатели
: высокий КПД и мощность
Серводвигатели существуют уже давно и используются во многих приложениях. Они небольшие по размеру, но обладают большой мощностью и очень энергоэффективны. Эти особенности позволяют использовать их для управления игрушечными машинками, роботами и самолетами с дистанционным или радиоуправлением.Серводвигатели также используются в промышленных приложениях, робототехнике, поточном производстве, фармацевтике и в сфере общественного питания. Но как работают маленькие ребята?
Схема сервопривода встроена прямо в моторный блок и имеет позиционируемый вал, который обычно оснащен шестерней (как показано ниже). Двигатель управляется электрическим сигналом, который определяет величину перемещения вала.
Что внутри сервопривода?
Чтобы полностью понять, как работает сервопривод, вам нужно заглянуть под капот.Внутри находится довольно простая установка: небольшой двигатель постоянного тока, потенциометр и схема управления. Двигатель прикреплен шестернями к управляющему колесу. Когда двигатель вращается, сопротивление потенциометра изменяется, поэтому схема управления может точно регулировать, насколько велико движение и в каком направлении.
Когда вал двигателя находится в желаемом положении, питание двигателя прекращается. В противном случае двигатель вращается в соответствующем направлении. Требуемое положение передается с помощью электрических импульсов по сигнальному проводу.Скорость двигателя пропорциональна разнице между его фактическим положением и желаемым положением. Таким образом, если двигатель находится рядом с желаемым положением, он будет вращаться медленно, в противном случае он будет вращаться быстро. Это называется пропорциональным управлением . Это означает, что двигатель будет работать ровно настолько, насколько это необходимо для выполнения поставленной задачи, очень эффективный маленький парень.
Как сервопривод управляется?
Внутренности серводвигателя (L) и сервопривода в сборе (R)
Сервомашинки
управляются посылкой электрического импульса переменной ширины или широтно-импульсной модуляции (ШИМ) через провод управления.Есть минимальный импульс, максимальный пульс и частота повторения. Серводвигатель обычно может поворачиваться только на 90 ° в любом направлении, всего на 180 °. Нейтральное положение двигателя определяется как положение, в котором сервопривод имеет одинаковую величину потенциального вращения как по часовой стрелке, так и против часовой стрелки.
ШИМ, отправляемый на двигатель, определяет положение вала и на основе длительности импульса, отправляемого через провод управления; ротор повернется в нужное положение. Серводвигатель ожидает увидеть импульс каждые 20 миллисекунд (мс), и длина импульса будет определять, насколько далеко двигатель вращается.Например, импульс 1,5 мс заставит двигатель повернуться в положение 90 °. Менее 1,5 мс перемещает его против часовой стрелки в положение 0 °, а время более 1,5 мс поворачивает сервопривод по часовой стрелке в положение 180 °.
Положение сервопривода с регулируемой шириной импульса
Когда эти сервоприводы получают команду двигаться, они перемещаются в положение и удерживают это положение. Если внешняя сила толкает сервопривод, когда сервопривод удерживает позицию, сервопривод будет сопротивляться выходу из этого положения.Максимальное усилие, которое может проявить сервопривод, называется номинальным крутящим моментом сервопривода. Однако сервоприводы не будут оставаться на своем месте вечно; импульс положения должен быть повторен, чтобы сервопривод оставался на месте.
Типы серводвигателей
Есть два типа серводвигателей — переменного и постоянного тока. Сервопривод переменного тока может выдерживать более высокие скачки тока и, как правило, используется в промышленном оборудовании. Сервоприводы постоянного тока не предназначены для сильных скачков тока и обычно лучше подходят для небольших приложений.Вообще говоря, двигатели постоянного тока дешевле, чем их аналоги переменного тока.
Это также серводвигатели, которые были созданы специально для непрерывного вращения, что упрощает движение вашего робота. Они оснащены двумя шарикоподшипниками на выходном валу для уменьшения трения и легкого доступа к потенциометру регулировки точки покоя.
Применения серводвигателя
Сервоприводы используются в радиоуправляемых самолетах для позиционирования поверхностей управления, таких как рули высоты, рули направления, ходьба робота или управление захватами .Серводвигатели небольшие, имеют встроенную схему управления и обладают хорошей мощностью для своего размера.
В сфере общественного питания и фармацевтики инструменты предназначены для использования в более суровых условиях, где высока вероятность коррозии из-за многократной мойки при высоких давлениях и температурах для соблюдения строгих гигиенических стандартов. Сервоприводы также используются в поточном производстве , где требуется высокая повторяемость, но точная работа.
Конечно, вам не нужно знать, как работает сервопривод, чтобы использовать его, но, как и в случае с большинством электроники, чем больше вы понимаете, тем больше возможностей открывается для расширенных проектов и возможностей проектов.Если вы любитель, конструирующий роботов, инженер, разрабатывающий промышленные системы, или просто постоянно любопытствуете, куда вас приведут серводвигатели?
Руководство покупателя серводвигателя
Если у вас есть история или проект в области электроники, которым вы хотели бы поделиться, отправьте электронное письмо [электронная почта защищена].
Часто задаваемые вопросы о сервоприводах
Что такое сервопривод?
Как мне управлять сервоприводом?
В отличие от щеточных двигателей постоянного тока, сервоприводы не могут работать, просто подавая напряжение.Помимо подачи напряжения питания (на красный провод) для двигателя, по сигнальному проводу (обычно желтому или белому) должен быть послан специальный сигнал, называемый сигналом ШИМ. Этот сигнал может поступать из различных источников, таких как сервоконтроллеры, RC-приемники или Arduinos.
Сервоприводы
управляются посылкой им импульсов переменной ширины. Контрольный провод используется для отправки этого импульса. Параметры этого импульса заключаются в том, что он имеет минимальный импульс, максимальный импульс и частоту повторения.Учитывая ограничения вращения сервопривода, нейтраль определяется как положение, в котором сервопривод имеет точно такое же количество потенциального вращения в направлении по часовой стрелке, как и в направлении против часовой стрелки. Важно отметить, что разные сервоприводы будут иметь разные ограничения на их вращение, но все они имеют нейтральное положение, и это положение всегда составляет около 1,5 миллисекунд (мс).
Угол определяется длительностью импульса, подаваемого на провод управления.Это называется широтно-импульсной модуляцией. Сервопривод ожидает увидеть импульс каждые 20 мс. Длина импульса определяет, как далеко вращается двигатель. Например, импульс 1,5 мс заставит двигатель повернуться в положение 90 градусов (нейтральное положение).
Когда эти сервоприводы получают команду двигаться, они перемещаются в положение и удерживают это положение. Если внешняя сила толкает сервопривод, когда сервопривод удерживает позицию, сервопривод будет сопротивляться выходу из этого положения. Максимальное количество силы, которое может оказать сервопривод, — это номинальный крутящий момент сервопривода.Однако сервоприводы не будут оставаться на своем месте вечно; импульс положения должен быть повторен, чтобы сервопривод оставался на месте.
Когда на сервопривод подается импульс длительностью менее 1,5 мс, сервопривод поворачивается в положение и удерживает выходной вал на некоторое количество градусов против часовой стрелки от нейтральной точки. Когда импульс шире 1,5 мс, происходит обратное. Минимальная ширина и максимальная ширина импульса, который заставит сервопривод повернуться в допустимое положение, являются функциями каждого сервопривода.Разные марки и даже разные сервоприводы одной марки будут иметь разные максимумы и минимумы. Обычно минимальный импульс имеет ширину около 1 мс, а максимальный — 2 мс.
Еще один параметр, который меняется от сервопривода к сервоприводу, — это скорость поворота. Это время, которое требуется сервоприводу, чтобы перейти из одного положения в другое. Наихудшее время поворота — это когда сервопривод удерживает минимальное вращение, и ему дана команда перейти на максимальное вращение.На сервоприводах с очень высоким крутящим моментом это может занять несколько секунд.
Цель этой информации — дать обзор того, как работают сервоприводы и как с ними общаться. Хотя мы предприняли шаги для обеспечения качества информации здесь, ServoCity не дает никаких гарантий относительно представленной информации. ServoCity не несет ответственности за любое использование или неправильное использование предоставленной информации. Если у вас есть вопросы по этой информации, пишите на [email protected].
Как мне управлять сервоприводом от Arduino?
Как мне управлять сервоприводом с Raspberry Pi?
Хотя Raspberry Pis может выводить сигнал ШИМ, они часто не могут поддерживать чистый сигнал из-за отсутствия специального таймера.Если вы управляете сервоприводами с Raspberry Pi, мы настоятельно рекомендуем приобрести сервопривод для вашего Raspberry Pi.
Как включить сервопривод?
Лучший способ запитать сервопривод — это использовать аккумулятор с напряжением в диапазоне напряжений, указанном в таблице спецификаций страниц сервопривода. Обязательно используйте исправную батарею, которая может обеспечивать более чем достаточный ток. Поскольку ток втягивается, а не проталкивается, наличие большего тока, чем необходимо, не повредит сервоприводу (это все равно, что иметь больше газа, чем вам нужно, чтобы получить место в машине).Питание серводвигателя подается по красному проводу. Может быть полезно перерезать красный провод (или использовать X-Acto, чтобы вытащить разъем из корпуса), чтобы вы могли подавать питание отдельно от сигнала. Это позволит вам питать ваш приемник от другой батареи, чем ваш сервопривод, если им нужны другие напряжения. Это также позволит вам запитать двигатель сервопривода напрямую от батареи, в то время как сигнал поступает от Arduino, поскольку выводы Arduino не могут обрабатывать ток, необходимый сервоприводу (обычно они достигают максимума 40 мА).
Как послать сигнал на большое расстояние?
Иногда при отправке сигнала на большое расстояние сигнал может ухудшаться из-за падения напряжения и электромагнитных помех (EMI). Усилитель сервосигнала может решить эти проблемы и упростить передачу сигнала на большое расстояние по проводу.
Как мне повернуть сервопривод на определенную величину (90 °, 180 °, непрерывно и т. Д.)?
При управлении с помощью системы радиоуправления большинство сервоприводов для хобби предлагают вращение на 90 ° (45 ° в любом направлении) прямо из коробки.Иногда это можно увеличить, если ваша радиосистема предлагает настройку конечной точки или ваш сервоконтроллер имеет перемычку на 180 °. Если вы используете цифровые сервоприводы Hitec, вы просто хотите приобрести ручной программатор, чтобы увеличить вращение. Если у вас есть аналоговый сервопривод Hitec или Futaba, который предлагает вращение только на 90 °, угол поворота иногда можно увеличить до 180 °, выполнив простую модификацию.
Примечание: Вы можете приобрести у нас сервоприводы Hitec, предварительно модифицированные на нашем собственном производственном предприятии, на отдельных страницах сервоприводов Hitec.Эта модификация аннулирует все гарантии ServoCity и Hitec.
Как заменить сервопривод?
Как измеряется скорость сервопривода?
Как измеряется крутящий момент сервопривода?
На что ссылается «направление» сервопривода?
Все сервоприводы будут вращаться по часовой стрелке и против часовой стрелки. Направление вращения сервопривода зависит от сигнала, который принимает сервопривод. Не все сервоприводы сразу после установки совпадают по направлению вращения.Если вы подключите сервопривод Hitec к приемнику радиоуправления или сервоконтроллеру и прикажете сервоприводу повернуться вправо (по часовой стрелке), он переместится вправо. Если вы затем подключите сервопривод Futaba к тому же ресиверу или сервоконтроллеру и скажете ему двигаться в том же направлении, что и сервопривод Hitec, он будет двигаться в противоположном направлении (против часовой стрелки). Это легко исправить с большинством систем радиоуправления, поскольку они имеют функцию серво реверсирования
на передатчике. Эта разница между производителями является причиной того, что каждый сервопривод будет иметь спецификацию, указывающую направление, в котором сервопривод будет двигаться с возрастающим сигналом ШИМ.
Что такое серво-сплайн?
Зубчатый выходной вал сервопривода обычно называют шлицем сервопривода. Для разбивки всех различных видов шлицевых сервоприводов на сервоприводы, которые мы продаем, ознакомьтесь с записью Servo Spline в нашем глоссарии.
Объяснение сервоприводов
— SparkFun Electronics
Стандартные сервоприводы для хобби
Стандартный хобби или сервопривод с замкнутым контуром будет иметь диапазон движения 90 или 180 градусов.Некоторые из них будут немного больше или меньше указанного диапазона, поэтому проверьте спецификации двигателя, который вы хотите использовать, прежде чем внедрять его в свой проект. Стандартные сервоприводы обеспечивают обратную связь для контроллера, чтобы контролировать его положение на дуге перемещения по сигнальному проводу управления. Это позволяет вам перемещать сервопривод в точные места с правильной длиной импульса от вашего контроллера.
Непрерывное вращение
Сервоприводы с непрерывным вращением или «разомкнутым контуром» не работают как стандартные сервоприводы.Управляющий сигнал управляет только направлением и скоростью, но не положением. Они позволяют вам легко контролировать, насколько быстро движется приводной вал и в каком направлении он движется, но нет обратной связи для управления положением, поэтому они не рекомендуются для приложений, требующих перемещения между определенными точками на дуге вращения.
Размеры сервоприводов
Большинство сервоприводов для хобби классифицируются по размеру. У разных производителей могут быть небольшие различия в том, как они перечисляют свои размеры сервоприводов, но обычно их можно свести к трем типам: микро , стандартный и гигантский .Эти типы определяют как физический размер сервопривода, так и выходной крутящий момент, а также мощность, необходимую для создания этого крутящего момента.
У каждого типа есть свои преимущества и недостатки. Гигантский сервопривод будет способен генерировать намного больший крутящий момент, чем микро-сервопривод, но гигантский сервопривод потребует гораздо больше места и мощности для создания этой силы. Стандартный размер предлагает отличный вариант компромисса, где требования к мощности не слишком высокие, а выходной крутящий момент приемлем для большинства приложений.
Разбивка размеров для Hitec HS-85MG, Hitec HS-425BB и Hitec HS-805BB в миллиметрах
Принадлежности для сервоприводов
Сервопривод сам по себе не может сделать много, поэтому для получения максимальной отдачи от сервопривода необходимы аксессуары, подключенные к приводному валу. От удлинителей вала до комплектов захватов и наклонно-поворотных кронштейнов — есть все виды оборудования и компонентов, которые вы можете добавить в сервопривод, чтобы расширить и улучшить его функциональность.
При выборе сервопривода необходимо учитывать два важных фактора: размер шлицев или количество шлицев и размер сервопривода. Мы рассмотрели размеры сервоприводов в предыдущем разделе, поэтому здесь мы сосредоточимся на шлицах сервоприводов. Просто помните при выборе аксессуара для сервопривода, чтобы убедиться, что он будет работать с размером вашего сервопривода.
Размер шлицев сервопривода относится к размеру и количеству «зубцов» на выходном валу. Производители сервоприводов, такие как Hitec и Futaba, имеют несколько типов шлицев для различных классов сервоприводов.В зависимости от вашего сервопривода вы можете увидеть что-то вроде «C1 Spline» для стандартного сервопривода Hitec или, возможно, «3F Spline» для стандартного сервопривода Futaba. Как и размер сервопривода, просто убедитесь, что выбранные вами аксессуары вала соответствуют типу шлицев вашего сервопривода.
Серводвигатель
: описание типов и принципа работы.
Серводвигатель чаще всего используется для высокотехнологичных устройств в промышленных приложениях, таких как автоматизация. Это автономное электрическое устройство, которое вращает части машины с высокой эффективностью и точностью.Кроме того, выходной вал этого двигателя может поворачиваться на определенный угол. Серводвигатели в основном используются в бытовой электронике, игрушках, автомобилях, самолетах и многих других устройствах.
Таким образом, в этом блоге обсуждаются определение, типы, механизм, принцип, работа, управление и, наконец, приложения сервомашины.
Определение:
Серводвигатель — это поворотный привод или двигатель, обеспечивающий точное управление угловым положением, ускорением и скоростью.В основном у него есть определенные возможности, которых нет у обычного мотора. Следовательно, он использует обычный двигатель и соединяет его с датчиком обратной связи по положению.
Типы серводвигателей:
Серводвигатели
могут быть разных типов в зависимости от их применения. Наиболее важными из них являются: серводвигатель переменного тока, серводвигатель постоянного тока, бесщеточный серводвигатель постоянного тока, серводвигатель позиционного вращения, серводвигатель непрерывного вращения и линейный серводвигатель.
Типичный серводвигатель состоит из трех проводов, а именно: питания, управления и заземления.Форма и размер этих двигателей зависят от их применения.
1. Серводвигатель постоянного тока:
Основной принцип работы двигателя постоянного тока такой же, как и у других электромагнитных двигателей. Конструкция, конструкция и режимы работы разные. Роторы этого типа двигателей имеют большую длину ротора и меньший диаметр. Их размер больше, чем у обычных двигателей той же мощности.
Серводвигатель постоянного тока
Существуют различные типы серводвигателей постоянного тока:
1.Моторы серии:
Двигатели серии имеют высокий пусковой момент и потребляют большой ток. У такого двигателя плохая регулировка скорости.
2. Мотор серии Split:
Это двигатели с разделенным полем с долей киловатт. Мотор серии Split имеет типичную кривую крутящий момент-скорость. Эта кривая обозначает высокий крутящий момент при остановке и быстрое снижение крутящего момента на высокой скорости.
3. Двигатель параллельного управления:
Имеет две отдельные обмотки:
1.обмотка возбуждения — на статоре.
2. обмотка якоря — на роторе станка.
Обе обмотки подключены к источнику постоянного тока.
4. Шунтирующий двигатель с постоянными магнитами:
Это двигатель с фиксированным возбуждением, в котором поле фактически создается постоянным магнитом. Кроме того, характеристики аналогичны двигателю с фиксированным полем, управляемым якорем.
2. Серводвигатель переменного тока:
Серводвигатели переменного тока
— это двигатели переменного тока, в которых встроенные энкодеры используются с контроллерами для обеспечения обратной связи и управления с обратной связью.Следовательно, эти двигатели можно позиционировать с высокой точностью. Таким образом, ими можно управлять точно в соответствии с требованиями приложения.
Серводвигатели переменного тока классифицируются на два типа. Это двухфазный и трехфазный серводвигатель переменного тока. Сейчас большинство серводвигателей переменного тока относятся к типу двухфазных асинхронных двигателей с короткозамкнутым ротором. Они используются для приложений с низким энергопотреблением. Кроме того, трехфазный асинхронный двигатель с короткозамкнутым ротором теперь используется в приложениях, где используются системы большой мощности.
Серводвигатель переменного тока
3. Бесщеточный серводвигатель постоянного тока:
Двигатели
BLDC также широко известны как двигатели с электронной коммутацией или синхронные двигатели, работающие от электричества постоянного тока через инвертор или импульсный источник питания. Следовательно, это обеспечивает электрический ток переменного тока для управления каждой фазой двигателя через контроллер с обратной связью. Контроллер подает импульсы тока на обмотки двигателя, которые регулируют скорость и крутящий момент двигателя.
Конструкция системы бесщеточного двигателя обычно аналогична синхронному двигателю с постоянными магнитами.Наконец, преимущества бесщеточного двигателя перед щеточными двигателями — это высокое соотношение мощности к весу, высокая скорость и электронное управление. Бесщеточные двигатели находят применение в таких местах, как компьютерная периферия (дисководы, принтеры), ручные электроинструменты и транспортные средства, от моделей самолетов до автомобилей.
4. Серводвигатель позиционного вращения:
Серводвигатель позиционного вращения — самый важный серводвигатель. Следовательно, это также самый распространенный тип серводвигателя.Выходной вал вращается примерно на 180 градусов. Кроме того, он включает в себя физические упоры, расположенные в зубчатом механизме, для остановки вращения вне этих пределов для защиты датчика вращения. Эти обычные сервоприводы используются в радиоуправляемой воде, автомобилях с регулируемым соотношением, самолетах, роботах, игрушках и многих других приложениях.
5. Серводвигатель постоянного вращения:
Серводвигатель непрерывного вращения относится к обычному серводвигателю позиционного вращения, но он может вращаться в любом направлении бесконечно.Управляющий сигнал, а не установка статического положения сервопривода, понимается как скорость и направление вращения. Диапазон потенциальных команд заставляет сервопривод вращаться по часовой стрелке или против часовой стрелки, как предпочтительно, при изменении командного сигнала. Таким образом, этот тип двигателя используется в радарной тарелке, если вы едете, один на роботе или вы можете использовать его в качестве приводного двигателя на мобильном роботе.
серводвигатель непрерывного вращения
6. Линейный серводвигатель:
Линейный серводвигатель также похож на описанный выше серводвигатель позиционного вращения, но с дополнительными зубчатыми колесами для изменения выходной мощности с круговой на прямую и обратную.Хотя эти серводвигатели вряд ли можно найти, но иногда их можно найти в хобби-магазинах, где они используются в качестве приводов в самолетах более высоких моделей.
линейный серводвигатель
Принцип работы:
Серводвигатель
работает по принципу ШИМ (широтно-импульсной модуляции), что означает, что его угол поворота регулируется длительностью импульса, подаваемого на его управляющий PIN-код. В основном серводвигатель состоит из двигателя постоянного тока, который управляется переменным резистором (потенциометром) и некоторыми шестернями.
Механизм серводвигателя:
В основном серводвигатель — это сервомеханизм с обратной связью, который использует обратную связь по положению для управления своим движением и конечным положением. Более того, входом для его управления является сигнал (аналоговый или цифровой), представляющий заданное положение для выходного вала.
Двигатель оснащен энкодером определенного типа для обеспечения обратной связи по положению и скорости. В простейшем случае мы измеряем только позицию. Затем измеренное положение выхода сравнивается с командным положением внешнего входа контроллера.Теперь, если выходное положение отличается от ожидаемого выходного положения, генерируется сигнал ошибки. Это затем заставляет двигатель вращаться в любом направлении, в соответствии с необходимостью привести выходной вал в соответствующее положение. По мере приближения позиции сигнал ошибки уменьшается до нуля. Наконец мотор останавливается.
Очень простые серводвигатели могут позиционироваться только с помощью потенциометра и управления двигателем. Далее мотор всегда вращается на полной скорости. Хотя этот тип серводвигателя не находит широкого применения в промышленном управлении движением, он составляет основу простых и дешевых сервоприводов, используемых в моделях радиоуправления.
Серводвигатели
также находят применение в оптических энкодерах для измерения скорости выходного вала и в приводе с регулируемой скоростью для управления скоростью двигателя. Теперь это, в сочетании с алгоритмом управления PID, позволяет сервомотору быстрее и точнее находиться в командном положении с меньшим отклонением.
Работа серводвигателей:
Серводвигатели очень точно контролируют положение и скорость. Теперь потенциометр может определять механическое положение вала.Следовательно, он соединяется с валом двигателя через шестерни. Текущее положение вала преобразуется в электрический сигнал с помощью потенциометра и сравнивается с командным входным сигналом. В современных серводвигателях электронные энкодеры или датчики определяют положение вала.
Мы подаем команду в соответствии с положением вала. Если сигнал обратной связи отличается от заданного входа, пользователя предупреждает сигнал ошибки. Мы усиливаем этот сигнал ошибки и применяем его в качестве входного сигнала для двигателя, следовательно, двигатель вращается.И когда вал достигает требуемого положения, сигнал ошибки становится нулевым, и, следовательно, двигатель остается в неподвижном состоянии, удерживая положение.
Командный ввод осуществляется в виде электрических импульсов. Поскольку фактический вход в двигатель — это разница между сигналом обратной связи (текущее положение) и требуемым сигналом, следовательно, скорость двигателя пропорциональна разнице между текущим положением и требуемым положением. Мощность, потребляемая двигателем, пропорциональна расстоянию, которое ему необходимо преодолеть.
Управление серводвигателями:
Обычно серводвигатель поворачивается на 90 градусов в любом направлении, поэтому максимальное перемещение может составлять 180 градусов. Однако нормальный серводвигатель не может вращаться дальше до механического упора.
Берем три провода сервопривода: плюсовой, заземляющий и управляющий. Сервомотор управляется путем отправки сигнала с широтно-импульсной модуляцией (ШИМ) через провод управления. Импульс отправляется каждые 20 миллисекунд. Ширина импульсов определяет положение вала.
например,
Импульс длительностью 1 мс перемещает вал против часовой стрелки на -90 градусов, импульс 1,5 мс перемещает вал в нейтральное положение, равное 0 градусам, а импульс продолжительностью 2 мс перемещает вал по часовой стрелке на +90 градусов.
Серводвигатель с регулируемой шириной импульса
Когда мы приказываем серводвигателю двигаться, подавая импульс соответствующей ширины, вал перемещается в требуемое положение и удерживает его. Однако мотор сопротивляется изменениям. Чтобы двигатель удерживал свое положение, импульсы должны повторяться.
Приложения:
1. Робототехника: к каждому стыку робота мы подключаем серводвигатель. Таким образом, робот-манипулятор получает точный угол.
2. Конвейерные ленты: серводвигатели перемещают, останавливают и запускают конвейерные ленты, транспортирующие продукт на различных этапах, например, при упаковке / розливе продукта и маркировке.
3. Автофокус камеры: высокоточный серводвигатель, встроенный в камеру, корректирует объектив камеры для повышения резкости не в фокусе изображений.
4.Солнечная система слежения: серводвигатели регулируют угол наклона солнечных панелей в течение дня, и, следовательно, каждая панель продолжает смотреть на солнце, что приводит к использованию максимальной энергии от восхода до заката.
вот несколько ссылок на связанные темы:
наконец, мы надеемся, что эта статья была вам полезна. Пожалуйста, дайте нам знать в разделе комментариев ниже.
Спасибо за подписку! Пожалуйста, проверьте свою электронную почту для получения дальнейших инструкций.
Связанные
Комментарии
комментария
Как работает серводвигатель?
Серводвигатели — это двигатели, специально разработанные для использования в системах управления и робототехнике.Они используются для точного управления положением и скоростью при высоких крутящих моментах. Он состоит из подходящего двигателя, датчика положения и сложного контроллера. Серводвигатели можно охарактеризовать в соответствии с двигателем, управляемым сервомеханизмом, то есть, если двигатель постоянного тока управляется с помощью сервомеханизма, он называется серводвигателем постоянного тока. Таким образом, основными типами серводвигателя могут быть: (i) серводвигатель постоянного тока, (ii) серводвигатель переменного тока.
Серводвигатели доступны с номинальной мощностью от долей до нескольких 100 Вт.У них высокий крутящий момент. Ротор серводвигателя выполнен меньшего диаметра и более длинной по длине, так что он имеет меньшую инерцию.
Что такое сервомеханизм?
Сервомеханизм — это в основном замкнутая система, состоящая из управляемого устройства, контроллера, выходного датчика и системы обратной связи. Термин сервомеханизм, скорее всего, относится к системам, в которых необходимо управлять положением и скоростью.
Как работает серводвигатель?
Серводвигатели используются для очень точного управления положением и скоростью , но в простом случае можно управлять только положением.Механическое положение вала можно определить с помощью потенциометра, который соединен с валом двигателя через шестерни. Текущее положение вала преобразуется в электрический сигнал потенциометром и сравнивается с командным входным сигналом. В современных серводвигателях для определения положения вала используются электронные энкодеры или датчики.
Команда вводится в соответствии с требуемым положением вала. Если сигнал обратной связи отличается от заданного входа, генерируется сигнал ошибки.Этот сигнал ошибки затем усиливается и подается на вход двигателя, который заставляет двигатель вращаться. И когда вал достигает требуемого положения, сигнал ошибки становится нулевым, и, следовательно, двигатель остается в неподвижном состоянии, удерживая положение.
Командный ввод подается в виде электрических импульсов. Поскольку фактический входной сигнал, подаваемый на двигатель, представляет собой разницу между сигналом обратной связи (текущее положение) и подаваемым сигналом (требуемое положение), скорость двигателя пропорциональна разнице между текущим положением и требуемым положением.Мощность, требуемая двигателем, пропорциональна расстоянию, которое ему необходимо преодолеть.
Как управляется серводвигатель?
Обычно серводвигатель поворачивается на 90 ° в любом направлении, т.е. максимальное перемещение может составлять 180 °. Обычный серводвигатель не может вращаться дальше из-за встроенного механического упора.
Из сервопривода выведены три провода: плюсовой, заземляющий и контрольный. Сервомотор управляется путем отправки сигнала с широтно-импульсной модуляцией (ШИМ) через провод управления.Импульс отправляется каждые 20 миллисекунд. Ширина импульсов определяет положение вала. Например, пульс
1 мс перемещает вал против часовой стрелки на -90 °, импульс 1,5 мс перемещает вал в нейтральное положение, которое составляет 0 °, а импульс в 2 мс перемещает вал по часовой стрелке на + 90 °.
Когда серводвигатель получает команду на движение с помощью импульсов соответствующей ширины, вал перемещается в требуемое положение и удерживает его. Если внешняя сила пытается изменить положение вала, двигатель сопротивляется изменению.Чтобы двигатель удерживал позицию, необходимо повторять импульсы.
Применение серводвигателя
Серводвигатели широко используются в робототехнике, компьютерах, CD / DVD-плеерах, игрушках и т. Д. Сервомоторы широко используются в тех приложениях, где конкретная задача должна выполняться многократно и очень точно.
Как работает сервопривод RC? | Учебники Cytron Technologies
Поскольку многие студенты и любители используют сервопривод RC в своих проектах, давайте взглянем на сервопривод RC (для краткости сервоприводы).Цель этой информации — дать обзор того, как работают сервоприводы и как с ними общаться.
Что такое сервоприводы?
Хобби-сервоприводы с радиоуправлением (RC) — это небольшие приводы, разработанные для дистанционного управления моделями транспортных средств, таких как автомобили, самолеты и лодки. В настоящее время сервоприводы становятся все более популярными в робототехнике, создавая роботов-гуманоидов, роботов с биологическим вдохновением, роботов-манипуляторов и т.д. Это связано с тем, что их размер невелик, если принять во внимание встроенную схему.Более того, его способность вращаться и удерживаться в определенном положении или под определенным углом в соответствии с управляющими импульсами от одного сигнального провода также делает серводвигатель популярным в роботостроении. Внутри типичного сервопривода он содержит небольшой двигатель и редуктор для выполнения работы, потенциометр для измерения положения выходной шестерни и электронную схему, которая управляет двигателем, чтобы заставить выходную шестерню перемещаться в желаемое положение. Это «сервосистема», о которой мы поговорим в следующем разделе. Сервопривод имеет три провода; для питания (+ 5В), массы и сигнального провода.Поскольку все эти компоненты упакованы в компактный недорогой блок, сервоприводы являются отличными исполнительными механизмами для роботов.
Сервосистема
Сервоприводы управляются путем отправки им импульса переменной ширины. Пока сигнальный импульс присутствует в сигнальной линии, сервопривод будет поддерживать угловое положение вала после его поворота в это положение. По мере изменения сигнального импульса изменяется угловое положение вала. Это работает из-за сервосистемы, которая делает серводвигатель таким известным среди других приводов.На практике сервопривод означает, что вы можете установить и забыть, и он будет регулировать себя во время непрерывной работы посредством обратной связи.
Серводвигатель состоит из нескольких основных частей; двигатель и коробка передач, датчик положения, усилитель ошибки и драйвер двигателя, а также схема для декодирования запрошенного положения. На фото ниже представлена блок-схема типичного серводвигателя.
Блок-схема типичного серводвигателя RC
Приемная система радиоуправления (или другой контроллер) генерирует импульс переменной длины примерно каждые 20 миллисекунд.Длительность импульса обычно составляет от 1 до 2 миллисекунд. Длина импульса используется сервоприводом для определения положения, в которое он должен повернуться. Управляющий импульс подается на преобразователь ширины импульса в напряжение. Эта схема заряжает конденсатор с постоянной скоростью, пока импульс высокий. Когда импульс становится низким, заряд конденсатора подается на выход через подходящий буферный усилитель. Это по существу создает напряжение, зависящее от длительности приложенного импульса.
Схема настроена на получение полезного напряжения в течение периода от 1 мс до 2 мс.Выходное напряжение буферизировано и поэтому существенно не спадает между управляющими импульсами, поэтому продолжительность времени между импульсами не критична. Текущее положение вращения выходного вала серводвигателя считывается датчиком. Обычно это потенциометр (переменный резистор), который выдает напряжение, соответствующее абсолютному углу выходного вала.
Потенциометр затем передает свое текущее значение в усилитель ошибки, который сравнивает текущее положение с заданным положением от ширины импульса до преобразователя напряжения.
Усилитель ошибки — это операционный усилитель с отрицательной обратной связью. Он всегда будет пытаться минимизировать разницу между инвертирующим (отрицательным) и неинвертирующим (положительным) входами, направляя свой выход в правильном направлении. Выход усилителя ошибки — это либо отрицательное, либо положительное напряжение, представляющее разницу между его входами. Чем больше разница, тем больше напряжение. Выход усилителя ошибки используется для привода двигателя. Если он положительный, двигатель будет вращаться в одном направлении, а если отрицательный, он повернется в другом направлении.Это позволяет усилителю ошибки уменьшить разницу между своими входами (таким образом, замыкая цепь отрицательной обратной связи), и, таким образом, сервопривод переходит в заданное положение.
Servo Command
Сервоприводы управляются путем отправки им импульса переменной ширины. Сигнальный провод используется для отправки этого импульса. Параметры этого импульса заключаются в том, что он имеет минимальный импульс, максимальный импульс и частоту повторения. Учитывая ограничения вращения сервопривода, нейтраль определяется как положение, в котором сервопривод имеет точно такое же количество потенциального вращения в направлении по часовой стрелке, как и в направлении против часовой стрелки.Важно отметить, что разные сервоприводы будут иметь разные ограничения на их вращение, но все они имеют нейтральное положение, и это положение всегда составляет около 1,5 миллисекунд (мс).
Непрерывные импульсы на сервопривод RC
Угол определяется длительностью импульса, подаваемого на сигнальный провод. Это называется широтно-импульсной модуляцией. Сервопривод ожидает увидеть импульс каждые 20 мс. Длина импульса определяет, как далеко вращается двигатель. Например, 1.Импульс 5 мс заставит двигатель повернуться на 90 градусов (нейтральное положение).
Когда эти сервоприводы получают команду двигаться, они перемещаются в положение и удерживают это положение. Если внешняя сила толкает сервопривод, когда сервопривод удерживает позицию, сервопривод будет сопротивляться выходу из этого положения. Максимальное количество силы, которое может оказать сервопривод, — это номинальный крутящий момент сервопривода. Однако сервоприводы не будут оставаться на своем месте вечно; импульс положения должен быть повторен, чтобы сервопривод оставался на месте.
Когда на сервопривод подается импульс длительностью менее 1,5 мс, сервопривод поворачивается в положение и удерживает выходной вал на некоторое количество градусов против часовой стрелки от нейтральной точки. Когда импульс шире 1,5 мс, происходит обратное. Минимальная ширина и максимальная ширина импульса, который заставит сервопривод повернуться в допустимое положение, являются функциями каждого сервопривода. Разные марки и даже разные сервоприводы одной марки будут иметь разные максимумы и минимумы. Обычно минимальный импульс будет шириной около 1 мс (некоторые сервоприводы имеют значение 0.5 мс), а максимальный импульс будет шириной 2 мс (некоторые сервоприводы — 2,5 мс).
Положение сервопривода RC с сигналом
Еще один параметр, который меняется от сервопривода к сервоприводу, — это скорость поворота. Это время, за которое сервопривод переходит из одного положения в другое. Наихудшее время поворота — это когда сервопривод удерживает минимальное вращение, и ему дана команда перейти на максимальное вращение. На сервоприводах с очень высоким крутящим моментом это может занять несколько секунд.
C Управление серводвигателем с помощью микроконтроллера
Перед написанием программы для управления сервоприводом мы должны сначала подготовить схему.Как упоминалось ранее, сервопривод имеет 3 провода; каждый провод должен быть подключен, как показано на схеме ниже.
Пример схемы для управления сервоприводом RC
Чтобы управлять серводвигателем, мы должны иметь возможность генерировать импульс примерно каждые 20 мсек, хотя фактическое время между импульсами не критично. Однако ширина импульса должна быть точной, чтобы мы могли точно установить положение сервопривода. Есть несколько методов записи сигнального импульса для сервопривода.
Процедура задержки
Этот метод является наиболее простым и простым способом управления сервоприводом. Подходит для новичков, которые только начинают изучать сервопривод. Алгоритм прост; сначала выходной вывод сервопривода устанавливается на высокий уровень, а затем ожидает времени, в течение которого сервопривод должен вращаться, например, подождите 1,5 мс, чтобы сервопривод был в нейтральном положении. Через 1,5 мс выходной вывод сервопривода устанавливается на низкий уровень в течение 20–1,5 мс, что составляет 18,5 мс, так что общий период составляет 20 мс. Повторите шаг, чтобы получить непрерывный пульс.Через некоторое время, если вы намереваетесь повернуть сервопривод в другое положение, например, на 180 градусов, вы должны повторить шаг с задержкой 2 мс (зависит от спецификации сервопривода) после установки серво штифта на высокий уровень и задержки 18 мс после того, как штифт сервопривода сработает. низкий.
Пример кода управления сервоприводом RC с задержкой
Сервопривод будет непрерывно вращаться от 90 градусов до 180 градусов и наоборот в соответствии с программой. Это только основная часть программы. Полный набор программ, включая подпрограмму задержки, не предоставляется, поскольку он только иллюстрирует, как работает сервопривод.
PWM
Импульс непрерывного сигнала для сервопривода может фактически рассматриваться как ШИМ (широтно-импульсная модуляция), где частота составляет 50 Гц, а рабочий цикл составляет от 5% до 10% (от 1 мс / 20 мс до 2 мс / 20 мс). Многие микроконтроллеры оснащены генераторами ШИМ, и большинство людей сначала рассматривают возможность их использования для генерации сигналов управления. К сожалению, они не подходят. Проблема в том, что нам нужен относительно точный короткий импульс, а затем большая задержка; и, как правило, у вас есть только один или два генератора ШИМ, в результате вы можете управлять только одним или двумя сервоприводами, если вы не используете компоненты переключения вне микроконтроллера для совместного использования с несколькими сервоприводами, и это усложнит оборудование.Генератор ШИМ предназначен для генерации точного импульса от 0% до 100% рабочего цикла, но нам нужно что-то от 5% до 10% рабочего цикла (от 1 мс / 20 мс до 2 мс / 20 мс). Если типичный генератор ШИМ имеет 8 или 10 битов, то мы можем использовать только небольшую часть битов для генерации импульса необходимой нам ширины, поэтому мы теряем большую точность, и разрешение будет хуже.
Таймеры
Другой способ управления сервоприводом — это использование прерываний по таймеру. Этот способ более выгоден, поскольку вам не нужно тратить время на ожидание процедуры задержки.Таймер настроен таким образом, чтобы у вас была высокая точность в течение времени импульса 1-2 миллисекунды. Вам нужно всего лишь установить таймер на прерывание на желаемое время, а затем установить серво-штырь на высокий или низкий уровень в соответствии с подходящей программой времени прерывания. Например, сначала вы устанавливаете серво вывод на высокий уровень и настраиваете таймер на прерывание в следующие 1 мс. Когда прерывание выполняется на 1 мс, вы переводите серво вывод на низкий уровень и снова настраиваете, чтобы таймер прерывался на следующих 19 мс, чтобы получить полный период 20 мс, который требуется большинству сервоприводов.Повторение этого цикла будет генерировать непрерывный импульс для сервопривода. Таким образом вы сэкономите много времени! В ожидании вы можете заняться другими делами, например обработать введенные вами данные. Этот метод делает ваш проект более эффективным. Чтобы управлять большим количеством сервоприводов, вы можете запускать таймер с большей скоростью и делать один сервопривод за раз, затем следующий, следующий и т.